RGB-Event-LiDAR Dataset
收藏arXiv2024-08-24 更新2024-08-28 收录
下载链接:
https://uts-ri.github.io/revel/
下载链接
链接失效反馈官方服务:
资源简介:
RGB-Event-LiDAR数据集由悉尼科技大学机器人研究所创建,用于辅助机器人系统的感知和决策。该数据集包含室内环境中两个移动人物的RGB图像、事件数据、点云和IMU数据,总计约774百万个事件和22000张RGB图像。数据集通过复杂的传感器套件和Vicon运动捕捉系统收集,确保了数据的精确性和多样性。创建过程中,数据集经过精细的校准和标记,以支持3D对象检测和空间姿态估计。该数据集主要应用于辅助机器人领域,特别是模拟导盲犬的智能不服从行为,以提高用户的安全性和机器人的鲁棒性。
The RGB-Event-LiDAR dataset was developed by the Robotics Institute of the University of Technology Sydney to facilitate perception and decision-making for robotic systems. This dataset includes RGB images, event data, point clouds and IMU data of two moving pedestrians in indoor environments, with a total of approximately 774 million events and 22,000 RGB images. Collected using a sophisticated sensor suite and the Vicon motion capture system, the dataset guarantees data accuracy and diversity. During its development, the dataset underwent meticulous calibration and annotation to support 3D object detection and spatial pose estimation. This dataset is primarily applied in the field of assistive robotics, specifically for simulating the intelligent disobedience behavior of guide dogs to improve user safety and enhance robotic robustness.
提供机构:
悉尼科技大学工程与信息技术学院机器人研究所
创建时间:
2024-08-24
搜集汇总
数据集介绍
构建方式
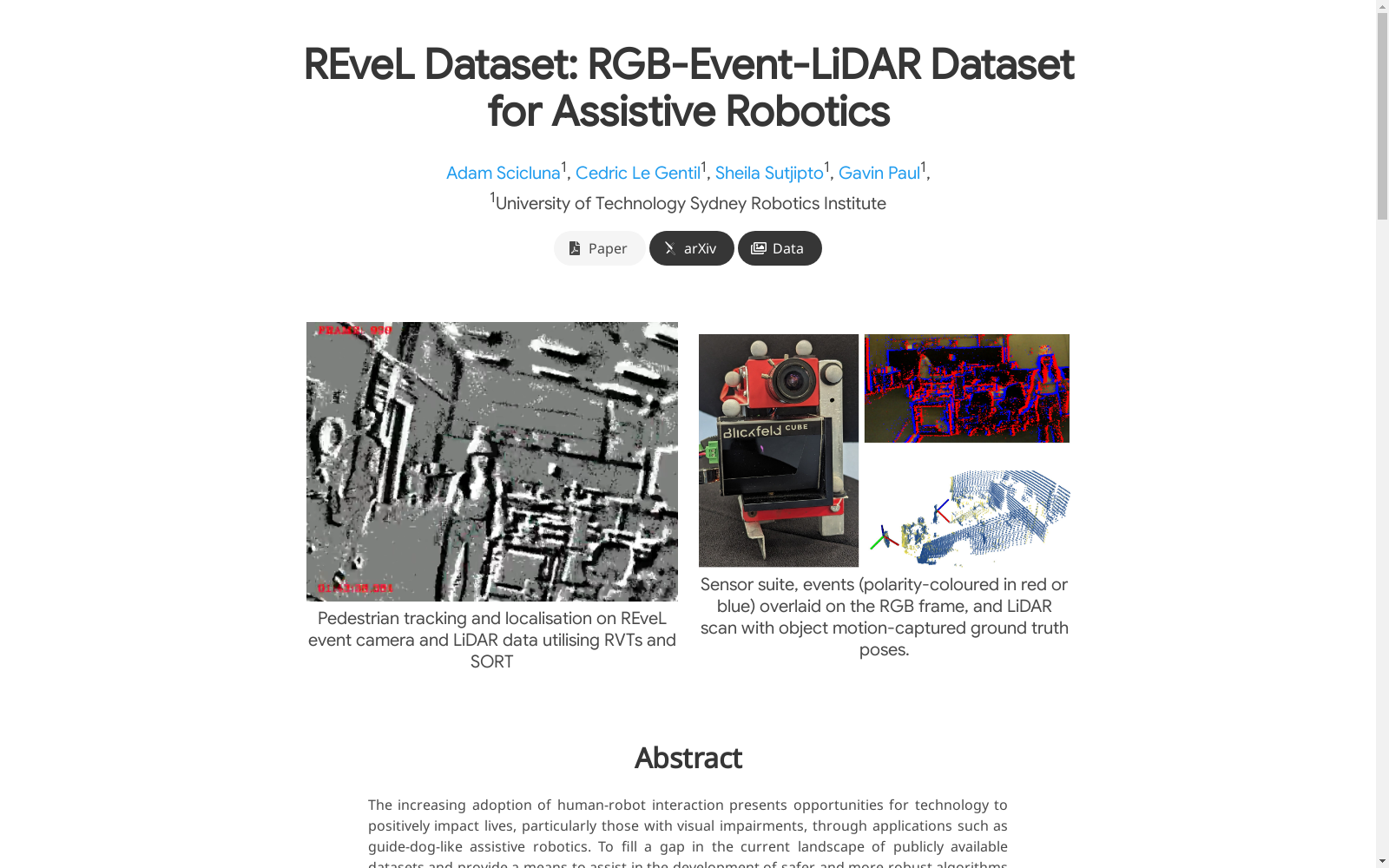
RGB-Event-LiDAR Dataset 是通过在室内环境中使用手持传感器套件进行数据收集而构建的。该套件包括一个 Inivation DAVIS346 事件相机和一个 Blickfeld Cube1 LiDAR,以及一个 Vicon 运动捕捉系统来跟踪两个人和传感器套件的 6-自由度姿态。数据收集过程记录了约 14 分钟的数据,包含大约 7.74 亿个事件、22,000 张 RGB 图像、6,700 个点云和 70,000 个场景中两个人的地面真实姿态。为了确保数据的有效性,首先进行了相机的内参校准以及各个传感器之间和反射标记之间的外参校准。
特点
RGB-Event-LiDAR Dataset 的特点在于它提供了来自事件相机、RGB 相机、LiDAR 和 IMU 的多模态数据,以及运动捕捉系统提供的两个人和传感器套件的地面真实姿态。这使得该数据集成为研究多模态动态物体检测和 3D 定位的有力工具。数据集还包含丰富的标签信息,如头盔颜色对应的类标识符,方便用户进行分类和识别。
使用方法
使用 RGB-Event-LiDAR Dataset 时,首先需要进行相机和传感器的校准,以便正确处理和融合多模态数据。然后,可以选择基于 RGB 或事件相机数据进行 2D 物体检测,并使用 Simple Online and Real-time Tracking (SORT) 算法进行跟踪。接下来,使用 LiDAR 数据进行 3D 定位和跟踪。用户可以根据需要选择不同的检测算法,如 YOLOv4 或 RVT,并利用提供的地面真实姿态数据进行性能评估和算法优化。
背景与挑战
背景概述
RGB-Event-LiDAR Dataset 是由悉尼科技大学机器人研究所的研究团队创建的,旨在解决辅助机器人领域,特别是为视障人士提供导盲犬类辅助机器人所面临的挑战。该数据集创建于2024年,主要由Adam Scicluna、Cedric Le Gentil、Sheila Sutjipto和Gavin Paul等研究人员负责。该数据集的核心研究问题是如何利用RGB图像、事件相机数据和LiDAR数据来实现动态对象的精确3D定位和跟踪,以及如何将这些感知技术应用于辅助机器人,使其能够准确识别和避免动态环境中的障碍物,确保用户的安全。该数据集的发布对相关领域的研究具有显著的影响力,它填补了公开数据集的空白,为研究人员提供了一个宝贵的资源,以开发更安全、更鲁棒的算法。
当前挑战
RGB-Event-LiDAR Dataset 面临的挑战主要包括:1) 准确的3D定位:由于2D图像-LiDAR融合在准确3D定位方面的挑战,需要进一步的改进和优化;2) 事件相机数据的应用:当前最先进的基于事件的检测模型在应用于辅助机器人等场景时,其准确性和召回率在不同置信度和交并比阈值下表现不佳,需要开发新的算法以更好地利用事件相机数据;3) 多模态数据融合:如何有效地融合RGB、事件相机和LiDAR数据,以实现更全面的场景理解和更准确的3D定位和跟踪,是当前研究的一个重要方向。
常用场景
经典使用场景
RGB-Event-LiDAR数据集在辅助机器人领域具有广泛的应用前景,特别是在开发类似导盲犬的辅助机器人方面。该数据集包含RGB、事件、点云和IMU数据,以及场景中两个人的真实姿态。通过比较RGB和事件多模态动态对象检测,该数据集为研究3D定位和场景理解提供了宝贵的数据资源。
解决学术问题
RGB-Event-LiDAR数据集解决了现有数据集在事件相机、RGB相机、LiDAR和IMU数据融合方面的不足。该数据集为研究多模态感知、3D定位和动态对象检测提供了真实数据,有助于推动辅助机器人领域的发展。
衍生相关工作
RGB-Event-LiDAR数据集的发布促进了多模态感知和3D定位算法的研究。基于该数据集,研究人员可以探索更准确的对象检测和跟踪算法,以及更有效的传感器融合方法。这些研究成果将有助于推动辅助机器人领域的发展,并为未来的智能机器人应用提供技术支持。
以上内容由遇见数据集搜集并总结生成


