BridgeData V2
收藏arXiv2024-01-18 更新2024-06-21 收录
下载链接:
https://rail-berkeley.github.io/bridgedata/
下载链接
链接失效反馈官方服务:
资源简介:
BridgeData V2是由加州大学伯克利分校和斯坦福大学等机构合作创建的大型机器人操作行为数据集,包含60,096个轨迹,覆盖24个环境。数据集设计用于支持大规模机器人学习研究,涵盖广泛的技能和环境变量,支持通过目标图像或自然语言指令进行任务调节。创建过程中,数据集通过人工操作和自主收集相结合的方式,确保了数据的多源性和多样性。该数据集适用于多种机器人学习方法,旨在解决机器人技能在不同环境和任务中的泛化问题,推动机器人学习领域的研究进展。
BridgeData V2 is a large-scale robotic manipulation behavior dataset co-developed by institutions including the University of California, Berkeley and Stanford University. It contains 60,096 trajectories covering 24 distinct environments. Designed to support large-scale robotic learning research, this dataset covers a broad spectrum of skills and environmental variables, and enables task conditioning via target images or natural language instructions. During its creation, the dataset was collected through a hybrid approach of manual operation and autonomous data gathering, ensuring the multi-source nature and diversity of the dataset. This dataset is compatible with a variety of robotic learning methods, aiming to address the generalization problem of robotic skills across different environments and tasks, and promote the advancement of research in the field of robotic learning.
提供机构:
加州大学伯克利分校
创建时间:
2023-08-25
搜集汇总
数据集介绍
构建方式
BridgeData V2数据集的构建方式旨在推动可扩展的机器人学习研究。该数据集包含了60,096条轨迹,这些轨迹是在24个不同的环境中使用一个公开可用的低成本机器人收集的。数据收集过程采用了多种任务和环境的广泛覆盖,以确保所学习到的技能能够泛化到新的实验室设置中。此外,数据集还支持通过目标图像或自然语言指令进行灵活的任务条件设置,以方便研究人员对数据集进行训练并执行新的任务。为了提高数据集的多样性,研究人员还收集了大量的随机化的“捡起和放置”数据,以增强基础物体重新定位技能的鲁棒性。
特点
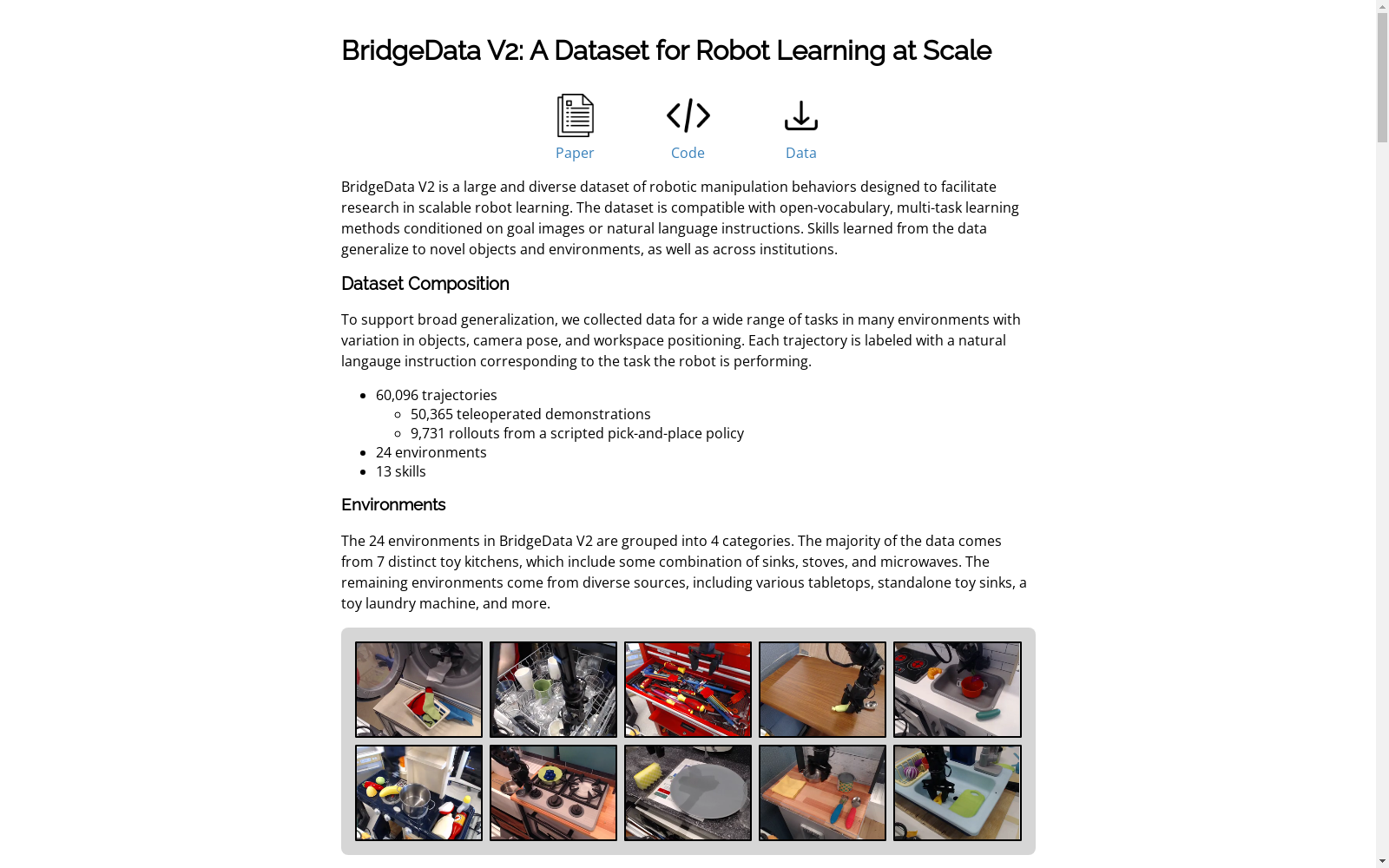
BridgeData V2数据集的特点在于其多样性和开放性。数据集包含了13种技能,包括捡起和放置、推、擦、堆叠、折叠等,以及24种不同的环境,包括厨房、水槽、桌面等。此外,数据集还包含了超过100个不同的物体,以及多个摄像头视角和深度数据。所有数据都包含了自然语言标签,以便于进行语言条件设置。数据集的构建方式使得它可以兼容多种不同的机器人学习方法,包括基于目标图像或自然语言指令的开放词汇、多任务学习方法。
使用方法
BridgeData V2数据集的使用方法非常灵活。研究人员可以使用该数据集训练各种机器人学习方法,包括模仿学习和强化学习。数据集的开放性和多样性使得它非常适合用于研究可扩展的机器人学习方法。此外,数据集还支持通过目标图像或自然语言指令进行灵活的任务条件设置,以便于研究人员对数据集进行训练并执行新的任务。研究人员还可以使用数据集来评估不同机器人学习方法的性能,并研究模型大小、数据集大小和数据集多样性对学习策略性能的影响。
背景与挑战
背景概述
BridgeData V2是一个旨在推动可扩展机器人学习研究的大型和多样化数据集,它包含60,096个轨迹,跨越24个环境,并收集在公开可用的低成本机器人上。这个数据集的设计旨在促进对机器人操作行为的广泛研究,并支持多种任务和环境的变化,从而使得机器人学习到的技能能够在不同的环境和领域中通用。BridgeData V2的特点是支持灵活的任务条件,可以通过目标图像或自然语言指令来实现。该数据集的创建和发布由来自加州大学伯克利分校、斯坦福大学、谷歌DeepMind和卡内基梅隆大学的多个研究人员合作完成。BridgeData V2的发布旨在加速可扩展机器人学习方法的研发,并为机器人学习研究提供宝贵的资源。
当前挑战
BridgeData V2面临的主要挑战包括:1)构建一个包含广泛任务和环境的数据集,以支持机器人学习算法的通用性和可扩展性;2)确保数据集能够支持灵活的任务条件,包括目标图像和自然语言指令,以适应不同的研究需求;3)在数据收集过程中,需要考虑如何高效地收集大量数据,同时保持数据的多样性和质量;4)在评估和验证数据集时,需要确保数据集能够支持多种学习算法,并能够在不同的实验室和环境中进行评估。
常用场景
经典使用场景
BridgeData V2作为机器人操作行为的大规模数据集,其经典使用场景主要包括促进可扩展的机器人学习研究。该数据集包含60,096条轨迹,跨越24个环境,涵盖了多种技能,如抓取和放置、推动、擦拭、堆叠、折叠等。这使得数据集能够支持多种不同的机器人学习方法,包括基于目标图像或自然语言指令的多任务学习。BridgeData V2的设计旨在促进机器人学习研究的通用性和可扩展性,为研究者提供了一种工具,可以训练出能够泛化到新任务、新环境和不同机构的机器人策略。
实际应用
BridgeData V2在实际应用场景中,主要应用于机器人操作技能的学习和泛化。该数据集提供的广泛技能和环境多样性,使得机器人能够在不同的环境中执行多种任务。例如,机器人可以在厨房环境中学习抓取和放置物体、推动和擦拭表面等技能。这些技能的掌握对于机器人在现实世界中的操作至关重要。此外,BridgeData V2还支持基于目标图像或自然语言指令的多任务学习,使得机器人能够理解并执行更复杂的任务。这些应用场景包括但不限于智能家居、工业自动化、医疗辅助等领域,为机器人技术的广泛应用提供了基础。
衍生相关工作
BridgeData V2的发布,衍生了一系列相关的研究工作。首先,该数据集为机器人学习领域的研究提供了重要的数据基础,使得研究人员能够在大规模数据集上进行实验和评估。其次,BridgeData V2的设计和构建方法为其他机器人数据集的构建提供了参考和借鉴。此外,基于BridgeData V2的训练和评估结果,研究人员提出了一系列新的机器人学习方法,如基于目标图像的行为克隆、基于自然语言指令的行为克隆等。这些方法在机器人学习领域取得了显著的成果,为机器人技术的进步和应用提供了支持。
以上内容由遇见数据集搜集并总结生成


