视觉室内导航数据集
收藏arXiv2025-08-15 更新2025-08-19 收录
下载链接:
https://sites.google.com/view/indoor-navigation-by-vision/
下载链接
链接失效反馈官方服务:
资源简介:
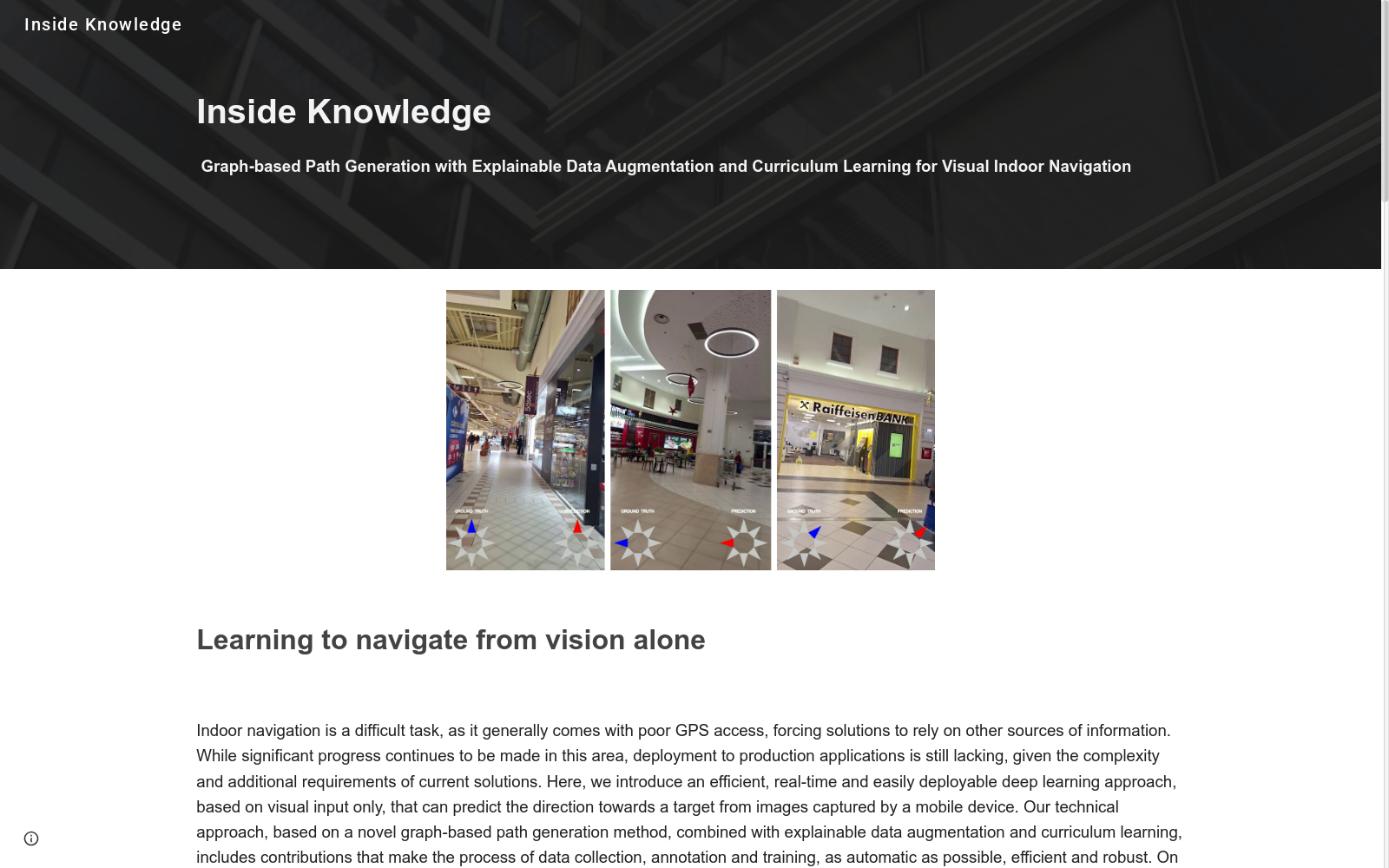
视觉室内导航数据集是一个大型的室内导航数据集,包括在一个大型购物中心录制的视频片段,每个帧都标注了正确的下一个方向,以指向不同的特定目标。该数据集的创建是通过在购物中心内行走并录制视频,然后使用拓扑地图对视频片段进行注释,从而生成所有可能的路径。数据集的大小约为3小时的视频,覆盖了购物中心的走廊和商店。该数据集的应用领域是室内导航,旨在帮助人们在没有GPS的情况下导航公共区域,特别是在大型建筑物中。
The Visual Indoor Navigation Dataset is a large-scale indoor navigation dataset comprising video clips recorded in a large shopping mall, where each frame is annotated with the correct next heading to different specific target locations. This dataset was constructed by traversing the shopping mall to record video footage, then annotating the video clips using topological maps to generate all possible navigation paths. The dataset spans approximately 3 hours of video content, covering the mall's corridors and retail stores. It is designed for indoor navigation applications, aiming to assist people in navigating public indoor spaces without relying on GPS, especially in large-scale buildings.
提供机构:
罗马尼亚科学与技术大学波利特尼克布加勒斯特分校、罗马尼亚科学院数学研究所西蒙斯托伊洛夫
创建时间:
2025-08-15
搜集汇总
数据集介绍
构建方式
视觉室内导航数据集的构建依托于真实场景下的视频采集,研究团队选择了一个中等规模的购物中心作为数据采集环境,使用普通智能手机在行走过程中拍摄视频片段。视频内容涵盖了不同时间段和人群密度下的场景变化,以确保数据的多样性和代表性。通过构建拓扑地图,将交叉口作为节点、走廊作为边,研究人员能够自动标注每一帧的正确行进方向。此外,采用基于图的路径生成算法,通过组合真实视频片段自动生成新的训练路径,极大丰富了训练数据的覆盖范围。
特点
该数据集的特点在于其完全基于视觉输入,无需依赖GPS、特殊传感器或预先部署的标记物,体现了高度自洽的导航解决方案。数据集包含了多样化的室内场景,如不同装饰风格和人群密度下的环境,增强了模型的泛化能力。每一帧视频都配有精确的方向标注,这些标注通过结合光流估计和单目深度预测技术自动生成,确保了数据的准确性和一致性。此外,数据集还特别关注了转向和交叉口等关键导航时刻的数据收集,为模型训练提供了丰富的挑战性场景。
使用方法
该数据集主要用于训练和评估基于视觉的室内导航模型。研究人员可以采用卷积神经网络(CNN)架构,输入连续的视频帧和目标位置编码,预测行进方向。为了提高模型鲁棒性,建议结合课程学习和数据增强策略,如基于Grad-CAM的注意力掩码技术。在实际应用中,训练好的模型可部署于移动设备,实时分析摄像头捕获的画面,为用户提供方向指引。数据集的图路径生成算法也为开发新型导航算法提供了灵活的数据合成工具,支持从任意起点到终点的虚拟路径构建。
背景与挑战
背景概述
视觉室内导航数据集由Daniel Airinei、Elena Burceanu和Marius Leordeanu等研究人员于2025年提出,旨在解决室内导航中GPS信号弱、依赖特殊传感器或标记的问题。该数据集采集于一个中型购物中心,包含3小时的视频片段,每帧标注了朝向特定目标的下一个正确方向。其核心创新在于仅依赖视觉输入,无需额外传感器或场景修改,为室内导航研究提供了真实场景下的高质量数据。该数据集的推出显著推动了基于视觉的室内导航技术的发展,尤其在辅助视觉障碍人士导航方面具有重要应用价值。
当前挑战
视觉室内导航数据集面临的挑战主要包括两方面:在领域问题层面,室内导航需克服GPS信号缺失、动态环境干扰(如行人遮挡)以及长走廊导致的类别不平衡问题;在构建过程层面,数据采集需处理手机抖动、光线变化等现实因素,而方向标注则依赖复杂的光流与深度估计算法。此外,生成覆盖所有可能路径的训练数据需设计高效的图基路径生成算法,以有限视频片段合成多样路径。模型还需应对圣诞节等季节性装饰带来的分布偏移问题,这对算法的鲁棒性提出了更高要求。
常用场景
经典使用场景
视觉室内导航数据集在室内导航领域具有广泛的应用价值,尤其在复杂室内环境中的路径规划和导航任务中表现突出。该数据集通过视频片段和自动标注的方向信息,为研究者提供了丰富的训练和测试素材。其经典使用场景包括购物中心、地铁站等大型室内结构的导航任务,帮助用户在不熟悉的环境中快速找到目标位置。数据集中的每一帧都标注了正确的行进方向,使得模型能够学习如何在复杂环境中进行精准导航。
衍生相关工作
该数据集衍生了许多相关研究工作,尤其是在视觉导航和路径规划领域。基于该数据集的研究提出了多种深度学习模型,如结合图神经网络和课程学习的导航算法。此外,数据集的自动标注技术和路径生成方法也被广泛应用于其他室内导航任务中。相关经典工作包括基于Grad-CAM的注意力机制研究、多目标视觉导航系统的开发,以及针对复杂环境中动态障碍物的鲁棒导航算法。这些工作进一步推动了室内导航技术的发展和应用。
数据集最近研究
最新研究方向
视觉室内导航数据集的最新研究方向聚焦于基于图结构的路径生成方法,结合可解释性数据增强和课程学习策略,以提升导航系统的鲁棒性和实时性能。在复杂室内环境中,如购物中心,该数据集通过自动标注视频帧中的行进方向,为仅依赖视觉输入的导航系统提供了丰富的训练样本。研究热点包括如何在不依赖GPS、特殊传感器或预设标记的情况下,实现高精度的方向预测,以及如何通过深度学习模型处理动态障碍物(如行人)对视觉输入的干扰。这一方向对辅助视觉障碍人士的室内导航具有重要应用价值,同时也为机器人自主导航和增强现实技术提供了新的研究思路。
相关研究论文
- 1Inside Knowledge: Graph-based Path Generation with Explainable Data Augmentation and Curriculum Learning for Visual Indoor Navigation罗马尼亚科学与技术大学波利特尼克布加勒斯特分校、罗马尼亚科学院数学研究所西蒙斯托伊洛夫 · 2025年
以上内容由遇见数据集搜集并总结生成


