drone-formations-r1
收藏Hugging Face2025-03-13 更新2025-03-14 收录
下载链接:
https://huggingface.co/datasets/Buaa1/drone-formations-r1
下载链接
链接失效反馈官方服务:
资源简介:
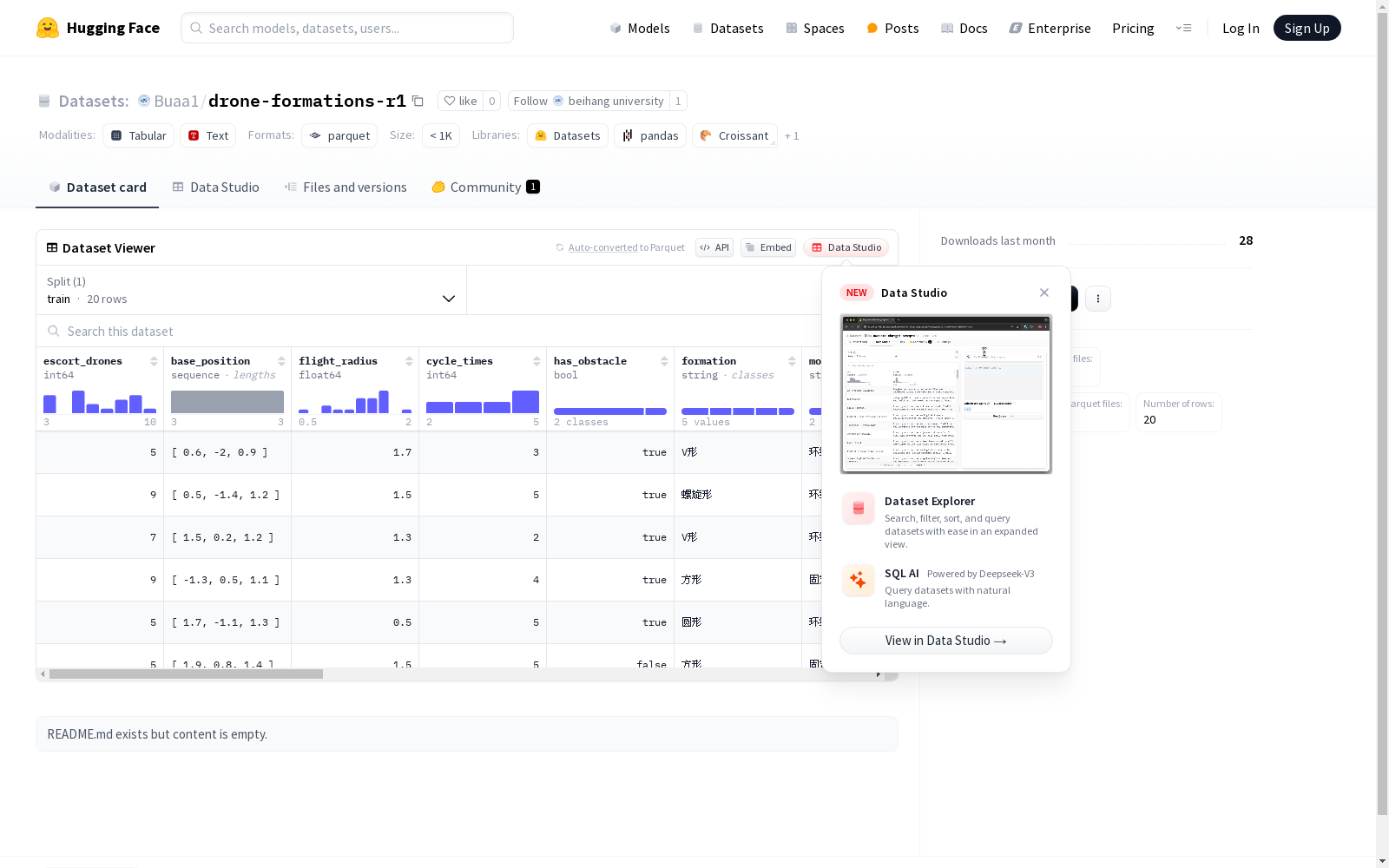
这是一个关于无人机护航任务的数据集,包含了护航无人机的数量、基地位置、飞行半径、周期次数、是否有障碍物、编队、运动模式、目标运动、障碍物策略等信息。数据集还提供了问题和解决方案的文本描述,以及消息内容和角色信息。元数据中包含了基地位置、颜色映射、周期次数、护航无人机数量、飞行半径、障碍物无人机数量和目标无人机数量等详细信息。
This is a dataset for unmanned aerial vehicle (UAV) escort missions. It includes information such as the number of escort UAVs, base locations, flight radius, cycle counts, presence of obstacles, formations, movement patterns, target movements, and obstacle strategies. The dataset also provides textual descriptions of problems and their corresponding solutions, as well as message content and role information. The metadata contains detailed information including base locations, color mapping, cycle counts, number of escort UAVs, flight radius, number of obstacle UAVs, and number of target UAVs.
创建时间:
2025-03-08
搜集汇总
数据集介绍
构建方式
drone-formations-r1数据集的构建,是通过采集无人机编队飞行过程中的各项参数,包括伴随无人机数量、基站位置、飞行半径、周期次数等,结合障碍物存在与否、编队队形、运动模式等信息,以及对应的解决方案和通信消息内容,构建成一个综合性的数据集。该数据集体现了无人机编队在遇到障碍物时的自适应调整能力,以及相应的通信协议。
特点
该数据集的特点在于其多维度的数据结构,涵盖了无人机编队飞行的多个方面,如飞行路径、编队队形、运动模式等,同时包含了障碍物处理策略和通信信息,为研究无人机编队行为和智能决策提供了丰富的信息基础。此外,数据集还包含了训练集的划分,便于模型的训练和验证。
使用方法
使用drone-formations-r1数据集时,用户可根据具体的研究需求,对数据集中的各项特征进行提取和分析。例如,通过分析伴随无人机数量和基站位置,可以研究无人机编队的部署策略;通过障碍物处理策略和通信信息,可以深入理解无人机在遇到障碍物时的决策过程。数据集的元数据部分还提供了额外的信息,有助于用户更全面地了解数据集。
背景与挑战
背景概述
drone-formations-r1数据集是在现代无人机研究领域中,为了探索无人机编队与导航策略而构建的重要资源。该数据集由一支专注于无人机系统研究的团队于近年开发,旨在模拟和解决无人机在执行护航任务时的动态编队问题。数据集涵盖了无人机的基础位置、飞行半径、护航周期、是否遇到障碍物、编队形式、运动模式、目标运动等多种复杂情景,为研究人员提供了一手的实验数据和基础信息。drone-formations-r1数据集的出现,对无人机编队控制策略的研究与优化具有重要的推动作用,为相关领域的学术交流和科技进步贡献了宝贵的资源。
当前挑战
尽管drone-formations-r1数据集为无人机编队研究提供了丰富的情景数据,但在实际应用中仍面临着诸多挑战。首先,无人机编队所涉及的环境复杂性使得数据集在模拟真实世界情况时存在一定的局限性。其次,构建数据集时,如何精确地模拟和记录无人机的运动模式以及障碍物策略,保证数据的真实性和可用性,是一大挑战。此外,数据集在处理多维度信息,如护航无人机与目标之间的交互信息、障碍物应对策略等方面,还需进一步的优化和扩展,以适应不断发展的研究领域需求。
常用场景
经典使用场景
在无人机编队研究领域,drone-formations-r1数据集提供了详尽的无人机编队行为和环境的描述,其经典使用场景在于模拟和评估无人机在执行护航任务时的性能。该数据集记录了无人机编队的基础位置、飞行半径、周期次数以及遇到障碍物时的策略等,为研究人员提供了一个宝贵的实验平台,以探究不同编队和运动模式对任务执行的影响。
解决学术问题
drone-formations-r1数据集解决了无人机编队在遇到障碍物时路径规划与避障策略选择的学术难题。通过提供具体的障碍物位置、无人机编队状态和解决方案,该数据集助力研究人员分析现有策略的有效性,并开发出更加智能的编队调整和避障算法,对于提升无人机编队的自主性和任务成功率具有重要的学术意义和实际应用价值。
衍生相关工作
基于drone-formations-r1数据集,学术界衍生出了一系列相关研究工作,包括无人机编队控制算法的优化、编队策略的适应性分析以及多无人机系统的协同决策等。这些研究不仅推动了无人机编队技术的进步,也为无人机系统的智能化发展提供了重要的理论支撑和实践指导。
以上内容由遇见数据集搜集并总结生成


