Vid2Sim
收藏github2025-03-13 更新2025-03-16 收录
下载链接:
https://github.com/Vid2Sim/Vid2Sim
下载链接
链接失效反馈官方服务:
资源简介:
Vid2Sim数据集包括30个从9个网络视频片段重建的高质量真实到模拟的仿真环境。每个片段包括15秒的前向视频,以30帧每秒录制,为每个场景提供450帧用于环境重建和模拟。
The Vid2Sim dataset comprises 30 high-quality real-to-simulated environments reconstructed from 9 web video clips. Each clip contains 15 seconds of forward-facing video recorded at 30 frames per second, providing 450 frames per scene for environment reconstruction and simulation.
创建时间:
2025-03-13
原始信息汇总
Vid2Sim 数据集概述
数据集简介
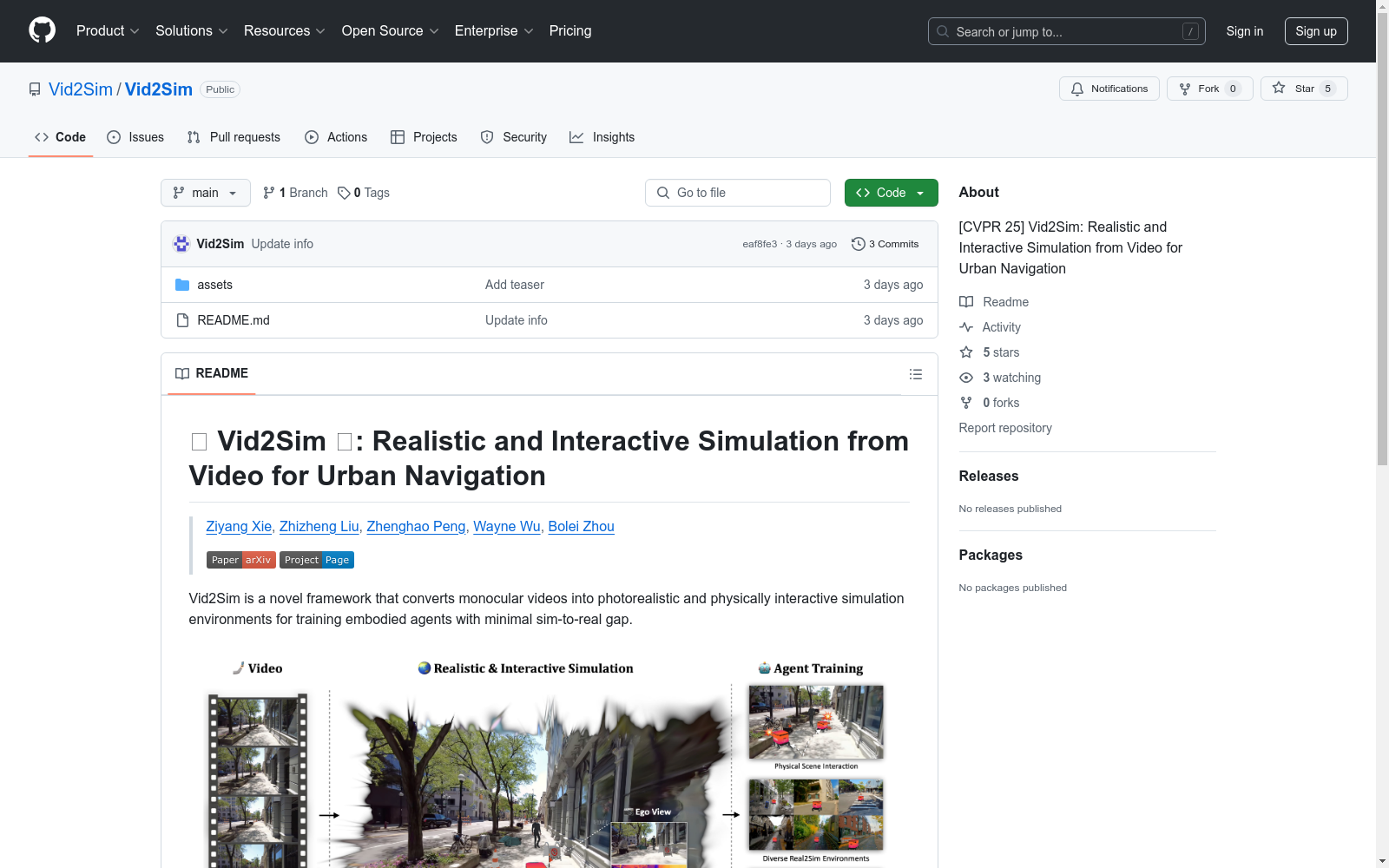
Vid2Sim 是一个创新框架,它将单目视频转换为逼真的、物理交互式模拟环境,用于训练具有最小仿真与现实差距的具身智能体。
数据集详情
- 数据集名称:Vid2Sim
- 包含内容:30 个高质量的从真实到模拟的仿真环境,由 9 个网络视频的片段重建而成。
- 视频片段:每个视频片段包含 15 秒正向 facing 视频记录,帧率为 30 fps。
- 总帧数:每个场景提供 450 帧用于环境重建和模拟。
引用信息
@article{xie2024vid2sim, title={Vid2Sim: Realistic and Interactive Simulation from Video for Urban Navigation}, author={Xie, Ziyang and Liu, Zhizheng and Peng, Zhenghao and Wu, Wayne and Zhou, Bolei}, journal={CVPR}, year={2025} }
搜集汇总
数据集介绍
构建方式
Vid2Sim数据集通过将单目视频转化为逼真且物理交互式的仿真环境,为训练具有最小仿真至现实差距的具身智能体提供了新的框架。该数据集包含30个高质量的现实至仿真环境,这些环境是从9个网络视频中的视频片段重建而成。每个视频片段包含15秒正向面对的视频记录,以30fps的帧率提供,共计每个场景450帧用于环境重建和仿真。
特点
该数据集的特点在于其构建的仿真环境具有高度的逼真性和物理交互性,能够极大地缩小仿真与现实的差距,这对于训练能够在城市导航任务中表现优异的智能体至关重要。此外,数据集涵盖了多样化的场景,有利于提升模型的泛化能力。
使用方法
使用Vid2Sim数据集时,用户需要首先安装相应的软件环境。具体使用方法尚在开发中,预计将提供完整的安装指南和使用说明。一旦安装完成,用户将能够加载仿真环境,并利用这些环境对智能体进行训练和测试。
背景与挑战
背景概述
Vid2Sim数据集,由Ziyang Xie、Zhizheng Liu、Zhenghao Peng、Wayne Wu及Bolei Zhou等研究人员共同开发,旨在将单目视频转化为逼真且物理交互的仿真环境,以最小化模拟与现实之间的差距,从而为训练具身智能体提供支持。该数据集的创建,对于城市导航领域的智能体训练具有重要的研究价值和实践意义,其研究成果预计将于2025年发表在CVPR会议上。
当前挑战
Vid2Sim数据集在构建过程中所面临的挑战主要包括:如何精确地从一个或多个单目视频中重建出高质量的三维仿真环境,并确保仿真环境与现实世界之间的逼真度和交互性;如何在保证物理真实性的同时,减少sim-to-real gap,即模拟环境与现实环境之间的差异。此外,数据集的构建还需解决视频内容的选择、处理以及数据标注等实际问题。
常用场景
经典使用场景
在自动驾驶与机器人导航领域,Vid2Sim数据集提供了一个创新性的框架,该框架能将单目视频转换为逼真的、物理交互式的仿真环境,从而最小化模拟与现实之间的差距。其经典使用场景在于为训练具身智能体提供高度逼真的环境,这些智能体在虚拟的城市导航任务中得以接受训练,进而提升其在现实世界中的表现。
实际应用
实际应用中,Vid2Sim数据集可用于自动驾驶系统的前期训练,使得智能体能够在虚拟的城市环境中进行复杂的导航任务训练。此外,该数据集也可用于机器人领域,尤其是在城市环境中的自主导航与交互任务,有助于提升机器人的环境适应性和决策能力。
衍生相关工作
基于Vid2Sim数据集,研究者们已经开展了一系列相关工作,如开发新的仿真环境评估指标、探索更为先进的视频到仿真转换算法,以及利用该数据集进行智能体训练策略的优化研究。这些工作进一步推动了虚拟仿真技术在自动驾驶和机器人领域的发展。
以上内容由遇见数据集搜集并总结生成


