Physics-driven Data Generation
收藏arXiv2025-02-28 更新2025-03-01 收录
下载链接:
https://lujieyang.github.io/physicsgen/
下载链接
链接失效反馈官方服务:
资源简介:
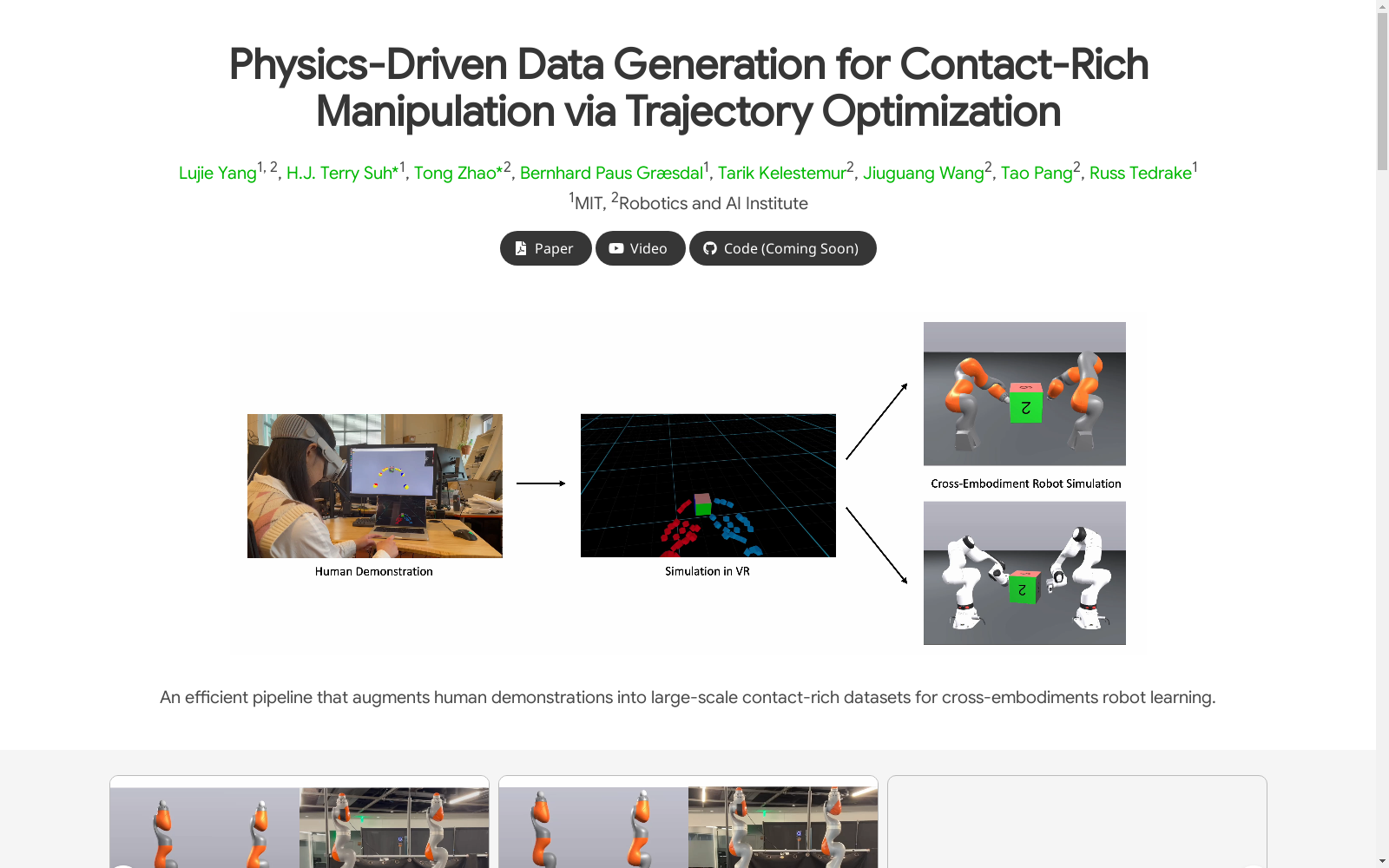
该数据集通过虚拟现实环境中的少量人类演示,利用基于模型的轨迹优化,生成多样化的、物理一致的、接触丰富的轨迹。这些轨迹能够实现跨机器人的数据传输,并有望重新利用在不同硬件配置或物理参数下收集的旧数据集。数据集适用于解决具有挑战性的长时距接触丰富操作任务,并可在多个机器人平台上进行泛化。
Leveraging model-based trajectory optimization, this dataset generates diverse, physically consistent, contact-rich trajectories from a small number of human demonstrations conducted in a virtual reality environment. These trajectories enable cross-robot data transfer and offer the potential to reuse older datasets collected under different hardware configurations or physical parameters. This dataset is suitable for addressing challenging long-horizon contact-rich manipulation tasks and supports generalization across multiple robotic platforms.
提供机构:
麻省理工学院计算机科学与人工智能实验室(CSAIL)
创建时间:
2025-02-28
搜集汇总
数据集介绍
构建方式
该数据集通过集成基于物理的模拟、人类演示和基于模型的规划,以高效地生成大规模、高质量的接触丰富机器人操作任务数据集。首先,在虚拟现实模拟环境中收集少量人体演示,然后使用基于优化的运动学重新定位和轨迹优化,将这些演示适应各种机器人形态和物理参数,从而生成一个多样化的、物理一致的、接触丰富的数据集,使跨形态数据传输成为可能,并具有重新利用不同硬件配置或物理参数下收集的旧数据集的潜力。
特点
该数据集的特点在于其高效的数据生成流程,通过将人类演示与基于模型的规划相结合,能够生成大规模、高质量的接触丰富数据集,从而解决现有数据集规模小、质量低的问题。此外,该数据集支持跨形态数据传输,使得演示数据可以适应不同的机器人形态,从而提高数据利用率。同时,该数据集还提供了物理一致性,使得数据在真实机器人部署时能够保持一致性。
使用方法
该数据集的使用方法主要涉及基于优化的运动学重新定位和轨迹优化。首先,将收集到的人类演示通过运动学重新定位,使其适应目标机器人形态,然后通过轨迹优化对轨迹进行局部细化,确保动态可行性。此外,该数据集还可以通过在模拟环境中进行训练和评估,来训练和验证机器人策略。
背景与挑战
背景概述
在机器人操作领域,尤其是接触丰富的操作任务中,数据集的稀缺性一直是限制机器人学习进展的关键因素。为了解决这一问题,Lujie Yang等人提出了一种名为“Physics-driven Data Generation”的数据生成方法。该方法通过结合物理模拟、人类演示和基于模型的规划,有效地生成了大规模、高质量的接触丰富的机器人操作数据集。该数据集的核心研究问题是如何在有限的资源下,生成多样化的、物理一致的高质量数据集,以便机器人学习算法可以在不同机器人形态和物理参数下进行泛化。该数据集的创建时间为2025年,主要研究人员来自麻省理工学院计算机科学与人工智能实验室(CSAIL)和机器人与人工智能研究所。该数据集对相关领域的影响力在于,它提供了一种高效的数据生成方法,可以帮助研究人员克服数据稀缺性的限制,从而推动机器人学习的发展。
当前挑战
该数据集面临的挑战包括:1) 所解决的领域问题:接触丰富的机器人操作任务的数据集通常规模较小,无法满足机器人学习算法对大规模数据的需求。Physics-driven Data Generation数据集通过结合物理模拟、人类演示和基于模型的规划,有效地生成了大规模、高质量的接触丰富的机器人操作数据集,为解决这一问题提供了新的思路。2) 构建过程中所遇到的挑战:数据集的构建过程中,研究人员需要解决如何将人类演示转化为机器人可执行的轨迹,以及如何保证生成的轨迹的动态可行性等问题。Physics-driven Data Generation数据集通过使用基于模型的轨迹优化方法,有效地解决了这些问题,为构建高质量的数据集提供了新的技术手段。
常用场景
经典使用场景
Physics-driven Data Generation数据集的经典使用场景是在机器人操控任务中,特别是在需要频繁接触的复杂任务中,如抓取、放置、翻转等。该数据集通过结合物理模拟、人类演示和基于模型的规划,能够有效地生成大规模、高质量的接触丰富的数据集。这些数据集可以用于训练机器人控制策略,使其能够灵活地在不同的机器人形态和物理参数下执行任务。
衍生相关工作
Physics-driven Data Generation数据集衍生了许多相关的经典工作,如MimicGen和DexMimicGen。这些工作通过自动化数据生成过程,能够从少量的人类演示中生成大规模、高保真的数据集,从而提高了机器人学习算法的效率和泛化能力。此外,Physics-driven Data Generation数据集还衍生了基于模型的规划方法,如接触隐式轨迹优化和基于采样的规划方法,这些方法能够有效地生成动态可行的轨迹,从而提高了机器人操控的效率和鲁棒性。
数据集最近研究
最新研究方向
Physics-driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization
相关研究论文
- 1Physics-Driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization麻省理工学院计算机科学与人工智能实验室(CSAIL) · 2025年
以上内容由遇见数据集搜集并总结生成


