DAVIS346c
收藏arXiv2025-09-10 更新2025-09-12 收录
下载链接:
https://bestrivenzc.github.io/EVDI-plus-plus/
下载链接
链接失效反馈官方服务:
资源简介:
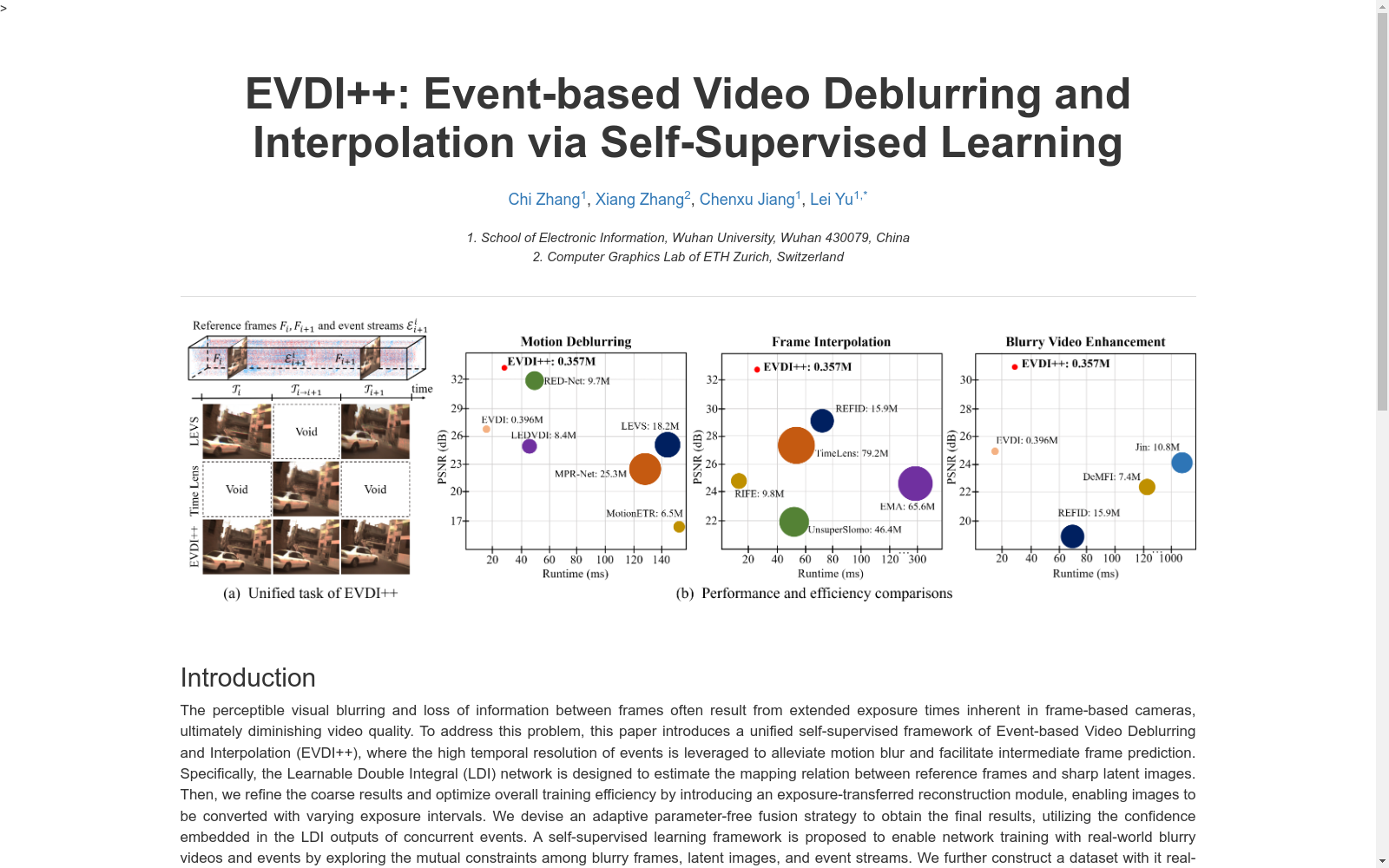
该数据集由真实世界模糊图像和事件组成,使用DAVIS346c相机构建,旨在展示EVDI++在实际场景中的泛化能力。数据集包含使用事件相机捕获的动态场景中的模糊图像和事件流,为基于事件的视频去模糊和插值任务提供数据基础。
This dataset consists of real-world blurred images and events, constructed using a DAVIS346C camera, and aims to demonstrate the generalization capability of EVDI++ in real-world scenarios. It contains blurred images and event streams of dynamic scenes captured by event cameras, providing a data foundation for event-based video deblurring and interpolation tasks.
提供机构:
武汉大学电子与信息学院,深圳鹏城实验室
创建时间:
2025-09-10
搜集汇总
数据集介绍
构建方式
DAVIS346c数据集通过DAVIS346c事件相机采集真实世界的模糊帧与事件流数据构建而成。该相机同步记录动态场景中的强度图像与异步事件流,利用其高时间分辨率特性捕捉毫秒级亮度变化。数据采集涵盖室内外多种场景及相机与物体运动模式,通过物理成像模型将高速连续帧合成为运动模糊图像,同时生成对应的事件序列,确保时空对齐与数据真实性。
特点
该数据集的核心特征在于同时提供强度图像与事件流的多模态数据,事件流以微秒级精度记录亮度变化,有效弥补传统帧相机在动态场景中的运动模糊与信息缺失问题。数据涵盖复杂光照条件与运动模式,包含线性与非线性的运动轨迹,具有高动态范围与低延迟特性。事件数据的异步稀疏表征与强度图像的同步采样相结合,为视频去模糊与插值任务提供丰富的时空线索。
使用方法
该数据集适用于自监督或监督学习框架,用于训练与评估视频去模糊、帧插值与模糊视频增强任务。使用时需将模糊帧与对应事件流作为输入,通过物理模型或神经网络学习亮度变化与运动映射关系。典型流程包括事件流的双积分计算、潜在清晰图像重建以及多模态特征融合,支持任意时间戳的潜在帧生成,无需依赖真实标注即可实现端到端的模型训练与跨域泛化验证。
背景与挑战
背景概述
DAVIS346c数据集由苏黎世联邦理工学院视觉智能系统实验室于2017年推出,专为事件相机与传统帧相机融合研究而设计。该数据集采用DAVIS346c混合传感器同步捕获240×346分辨率的事件流与RGB图像,有效解决了动态场景中运动模糊与帧间信息缺失的核心问题。其创新性地将异步事件数据与同步帧数据结合,为计算机视觉领域提供了首个大规模多模态基准,显著推动了运动去模糊、视频插帧等任务的发展。
当前挑战
该数据集构建面临两大挑战:一是多模态时序对齐难题,事件流微秒级异步采样与帧相机毫秒级曝光存在固有时序偏差,需通过精密硬件同步与标定消除;二是真实世界数据质量保障挑战,低光照条件下事件触发稀疏性及运动模糊边界的精确标注需依赖特殊光学装置。领域应用层面,模型需解决运动模糊中的纹理丢失问题,并克服事件噪声对积分重建的干扰,以实现高精度视频复原。
常用场景
经典使用场景
在动态场景视频处理研究中,DAVIS346c数据集凭借其同步采集的模糊帧与事件流数据,为自监督学习框架提供了关键支撑。该数据集最典型的应用场景在于联合视频去模糊与帧插值任务,研究者通过事件相机的高时间分辨率特性,能够从低帧率模糊输入中重建任意时间戳的清晰潜在图像,有效解决了传统方法在非线性运动场景下的性能局限。
衍生相关工作
基于DAVIS346c数据集衍生的代表性工作包括EVDI++统一学习框架,其创新性地将可学习双积分网络与自适应融合模块结合。后续研究如TimeLens++和REFID等方法进一步扩展了事件在视频插值与去模糊任务中的应用边界,推动了神经形态计算与计算机视觉的跨领域融合,为新型传感器与算法协同设计提供了理论基础。
数据集最近研究
最新研究方向
在动态视觉与计算摄影领域,DAVIS346c数据集因其同步提供事件流与传统帧图像的能力,已成为研究事件相机在视频复原任务中作用的关键资源。近期研究聚焦于利用事件数据的高时间分辨率特性,开发自监督学习框架以解决运动去模糊与帧插值问题。例如,EVDI++框架通过可学习双积分网络建模模糊帧与潜在清晰图像间的映射关系,结合自适应无参数融合策略,显著提升了在复杂非线性运动场景下的复原精度。此类工作不仅推动了多任务联合优化范式的发展,更通过构建真实世界模糊-事件数据集(如ColorRBE),缓解了合成数据与真实数据间的域差异问题,为移动机器人、自动驾驶等实时应用提供了高效且泛化性强的视觉增强方案。
相关研究论文
- 1EVDI++: Event-based Video Deblurring and Interpolation via Self-Supervised Learning武汉大学电子与信息学院,深圳鹏城实验室 · 2025年
以上内容由遇见数据集搜集并总结生成


