Goal Force synthetic causal primitives dataset
收藏arXiv2026-01-09 更新2026-01-13 收录
下载链接:
https://goal-force.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
Goal Force合成因果基元数据集由布朗大学与康奈尔大学联合创建,包含12,000条物理交互视频数据,涵盖弹性碰撞、多米诺骨牌效应等基础物理现象。数据集包含三个子集:3,000条多米诺骨牌链式反应视频、6,000个滚动球体碰撞案例以及3,000朵康乃馨的非刚性动力学模拟,所有数据均通过Blender和PhysDreamer物理引擎生成。该数据集通过多通道物理控制信号(直接力/目标力/质量)标注,专门用于训练视频生成模型理解物理因果关系。其核心应用在于构建神经物理模拟器,实现无需外部引擎的物理感知规划,可扩展至机器人操作、工具使用等复杂场景的零样本迁移。
The Goal Force Synthetic Causal Primitives Dataset, jointly created by Brown University and Cornell University, comprises 12,000 physically interactive video clips covering fundamental physical phenomena including elastic collisions and domino effects. The dataset contains three subsets: 3,000 videos of domino chain reactions, 6,000 rolling sphere collision cases, and 3,000 non-rigid dynamic simulations of carnations, with all data generated using the Blender and PhysDreamer physics engines. Annotated with multi-channel physical control signals (direct force, target force, and mass), this dataset is specifically designed to train video generation models to understand physical causal relationships. Its core applications lie in building neural physics simulators, enabling physics-aware planning without external engines, and supporting zero-shot transfer to complex scenarios such as robot manipulation and tool use.
提供机构:
布朗大学; 康奈尔大学
创建时间:
2026-01-09
搜集汇总
数据集介绍
构建方式
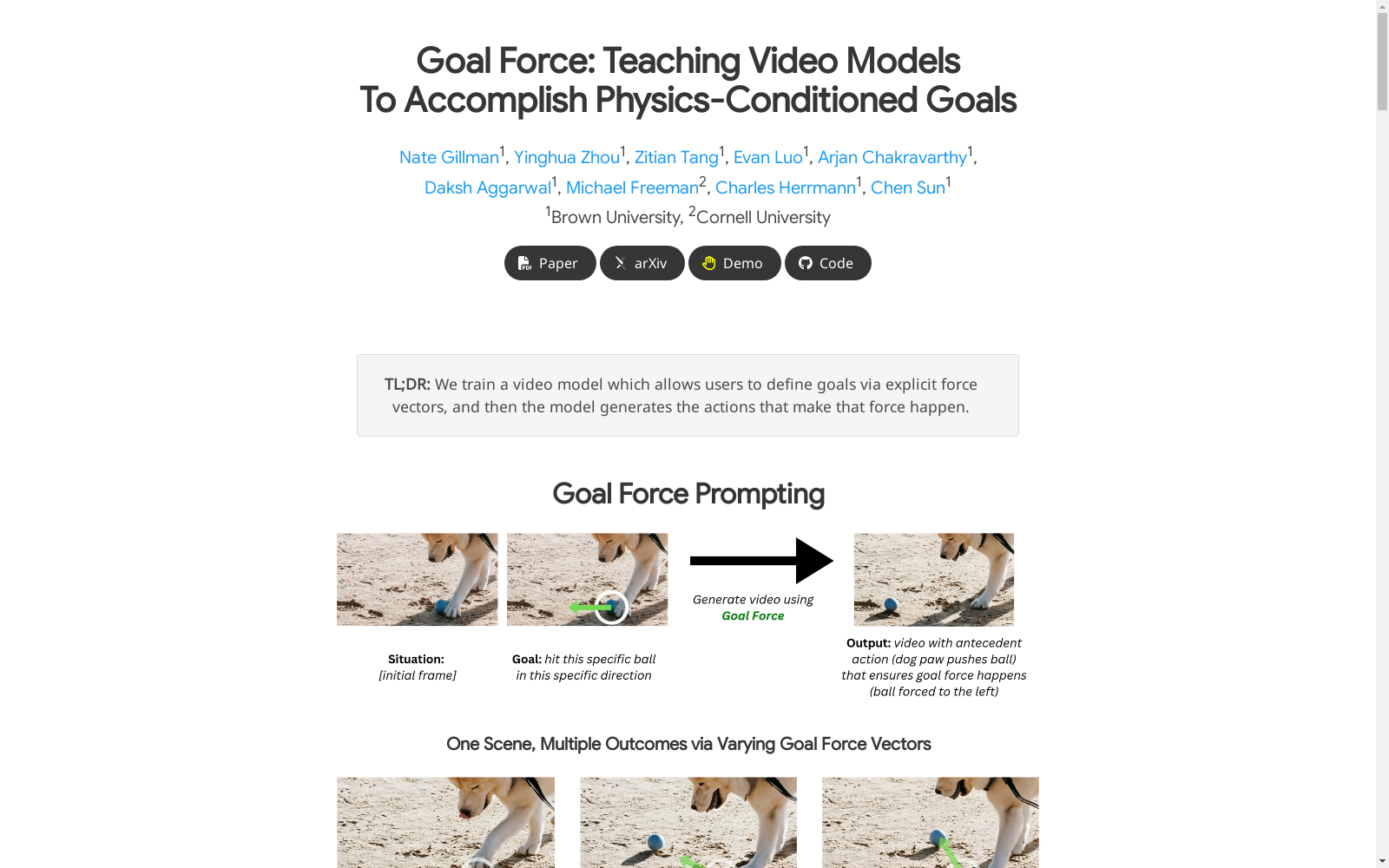
在视频生成模型作为世界模拟器的研究背景下,Goal Force合成因果基元数据集的构建旨在为模型提供基础物理交互的精确训练材料。该数据集通过Blender和PhysDreamer等工具生成,包含了三类精心设计的合成场景:多米诺骨牌链式反应、滚动球体碰撞以及植物摇摆动力学。每个视频均与一个多通道物理控制信号配对,该信号编码了直接力、目标力以及质量等物理属性,并通过随机掩码策略迫使模型学习从目标力推断前因动作或从直接力模拟后续结果的物理推理能力。
使用方法
在视觉规划和物理感知人工智能的研究中,该数据集主要用于训练视频生成模型,使其能够根据用户指定的目标力向量,推理并生成实现该目标所需的前因动作序列。使用方法涉及将多通道物理控制信号作为条件输入到基于ControlNet架构的扩散模型中,通过课程学习策略,模型学会在给定目标力时规划合理的因果链,或在给定直接力时模拟物理结果。训练后的模型可直接用于视觉规划任务,无需依赖外部物理引擎,即可在多样化场景中生成物理合理的动作视频,为机器人规划和交互式世界模型提供了新的控制范式。
背景与挑战
背景概述
在视频生成技术迅速演进为世界模型的背景下,布朗大学与康奈尔大学的研究团队于2026年提出了Goal Force合成因果基元数据集。该数据集旨在解决视频生成模型在机器人学与规划任务中目标指定模糊的核心问题,即传统文本指令过于抽象而目标图像又难以精确描绘动态物理过程的局限。通过构建包含弹性碰撞、多米诺骨牌倾倒等基础物理交互的合成视频集合,研究团队训练模型学习力在时空中的传播规律,使其能够根据用户指定的目标力向量推理并生成实现该目标的因果动作链。这项工作标志着视频生成模型向隐式神经物理模拟器演进的关键一步,为物理感知的视觉规划提供了新的范式。
当前挑战
该数据集致力于解决视频生成模型在物理条件目标达成任务中的核心挑战,即如何让模型理解并规划复杂的因果力链以实现用户指定的动态目标,而非仅仅模拟直接施加力的即时效果。在构建过程中,研究团队面临多重挑战:首先,需要设计能够准确编码目标力、直接力及质量等多通道物理控制信号的合成数据生成流程;其次,需确保模型能够从简单的合成基元数据中学习到可泛化的物理推理能力,以应对真实世界中工具使用、人-物交互等复杂场景;此外,训练策略需平衡因果信息随机掩码的引入,迫使模型同时学习从目标反推规划与从动作预测结果的双向推理能力,避免对特定数据模式的简单记忆。
常用场景
经典使用场景
在视频生成与物理交互建模领域,Goal Force合成因果基元数据集被广泛应用于训练模型理解并模拟基础物理交互过程。该数据集通过精心构建的合成场景,如弹性碰撞与多米诺骨牌连锁反应,为模型提供了学习力在时空维度传播的直观范例。研究者利用这些数据训练视频生成模型,使其能够从简单的物理交互中归纳出因果推理能力,进而生成符合物理规律的动态序列。这种训练范式使得模型能够在未见过的复杂场景中,如工具使用或多物体交互,展现出零样本泛化能力,从而为构建隐式神经物理模拟器奠定基础。
解决学术问题
该数据集主要解决了视频生成模型中目标指定模糊性与物理交互建模不足的学术难题。传统方法依赖文本或静态图像定义目标,往往难以捕捉动态任务中的物理细微差别,导致生成内容缺乏物理合理性。Goal Force数据集通过引入显式的力向量与中间动力学作为控制信号,使模型能够学习从目标力反向推理出前因动作的因果链。这促进了模型在无需外部物理引擎的情况下,实现精确的物理感知规划,推动了视频生成模型向物理基础世界模型的发展,为机器人规划与交互模拟提供了新的理论基础。
实际应用
在实际应用层面,该数据集支撑的模型被用于机器人视觉规划与交互任务仿真。例如,在机器人操作场景中,模型可根据指定的目标力自动生成实现该力所需的前因动作视频,如使用高尔夫球杆击球或通过花茎拾取玫瑰。这种能力使得机器人系统能够在虚拟环境中进行物理合理的任务预演,降低真实世界试错成本。此外,该框架还可应用于教育模拟与游戏开发,生成符合物理规律的动态交互内容,为用户提供直观的物理现象可视化与交互体验。
数据集最近研究
最新研究方向
在视频生成与物理世界建模的交叉领域,Goal Force synthetic causal primitives dataset 正推动着前沿研究向物理条件化目标实现的方向深化。该数据集通过合成因果基元(如弹性碰撞与多米诺骨牌效应)训练模型,使其能够将力向量在时空维度上进行传播,从而模拟复杂的物理交互链。当前研究热点集中于探索模型作为隐式神经物理模拟器的潜力,使其在无需外部物理引擎的情况下,实现零样本泛化至真实世界的工具操作、多物体因果链等场景。这一进展不仅提升了视频生成模型在机器人规划与交互式世界模型中的物理感知能力,也为实现更精准、可解释的视觉规划开辟了新路径,标志着生成式人工智能向具身推理与物理基础建模迈出了关键一步。
相关研究论文
- 1Goal Force: Teaching Video Models To Accomplish Physics-Conditioned Goals布朗大学; 康奈尔大学 · 2026年
以上内容由遇见数据集搜集并总结生成


