ClaraVid
收藏arXiv2025-03-23 更新2025-03-28 收录
下载链接:
https://rdbch.github.io/claravid/
下载链接
链接失效反馈官方服务:
资源简介:
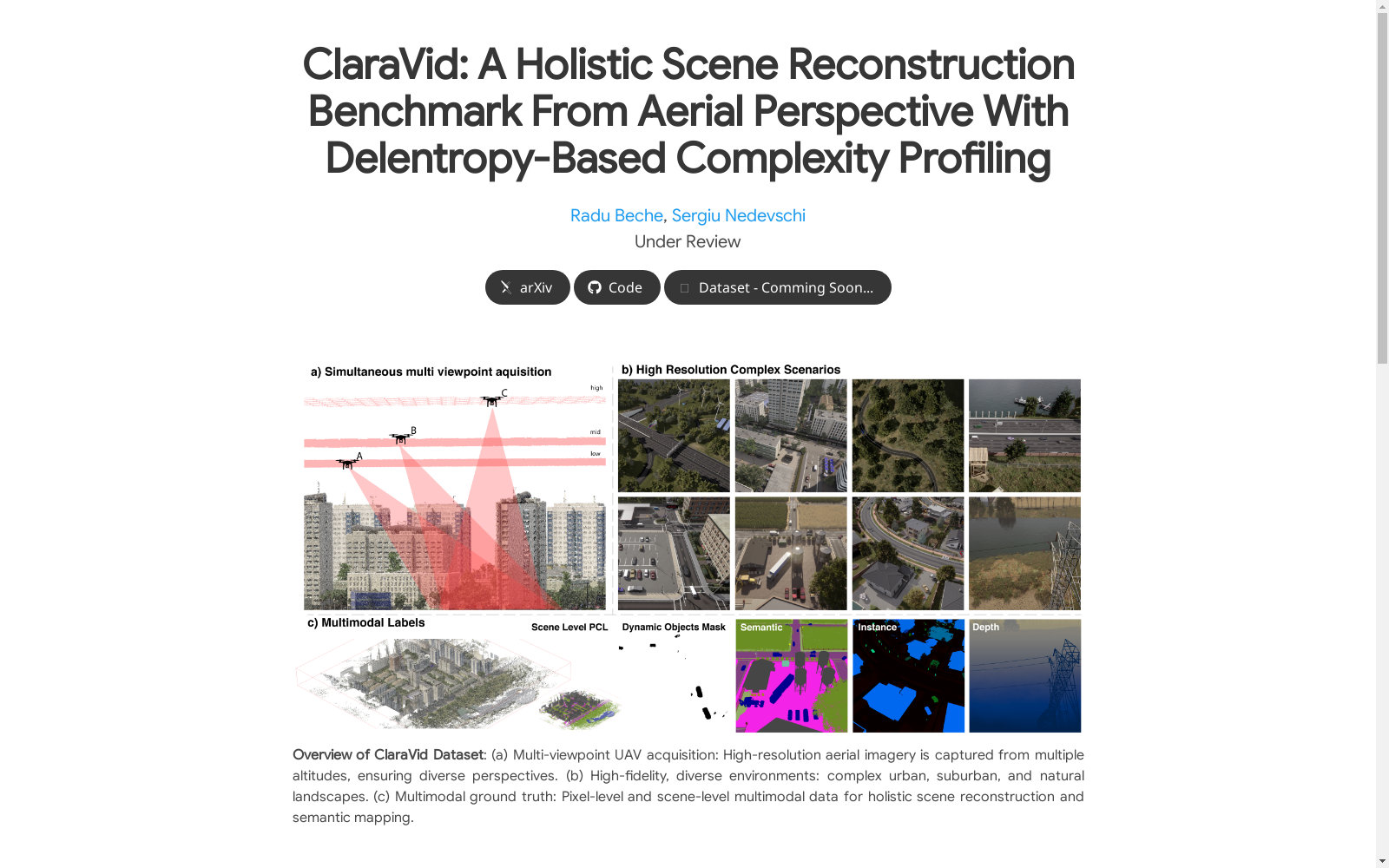
ClaraVid是一个合成空载数据集,由克卢日-纳波卡理工大学创建,旨在用于整体场景重建。该数据集包含16,917张高分辨率图像,从多个视角捕捉不同地形的高保真环境,提供了密集深度图、全景分割、稀疏点云和动态对象掩码等多模态注释。数据集通过优化的渲染流程确保了数据质量,适用于城市制图等实际应用。
ClaraVid is a synthetic dataset free of on-board sensors, created by the Technical University of Cluj-Napoca for holistic scene reconstruction. This dataset contains 16,917 high-resolution images that capture high-fidelity environments across diverse terrains from multiple viewpoints, and provides multi-modal annotations including dense depth maps, panoptic segmentation, sparse point clouds, and dynamic object masks. The dataset ensures data quality through an optimized rendering pipeline, and is suitable for practical applications such as urban mapping.
提供机构:
克卢日-纳波卡理工大学
创建时间:
2025-03-23
搜集汇总
数据集介绍
构建方式
ClaraVid数据集通过多视角无人机采集系统构建,采用高分辨率(4032×3024像素)同步采集技术,覆盖城市、郊区和自然景观等多种复杂环境。数据采集过程中,通过优化渲染管线减少常见的渲染伪影,确保数据的高保真度。此外,数据集还提供了密集深度图、全景分割、稀疏点云和动态对象掩模等多模态标注,为场景的语义和几何重建提供了全面的基础。
特点
ClaraVid数据集的特点在于其全面的多模态标注和高分辨率图像,涵盖了从低空无人机视角捕捉的多样化场景。数据集不仅包含传统的RGB图像和深度信息,还提供了全景分割和动态对象掩模,特别适用于动态场景的重建任务。此外,数据集引入了基于差分熵分析的Delentropic场景复杂度度量(DSP),能够定量评估场景的复杂性,为神经重建方法提供了可靠的先验信息。
使用方法
ClaraVid数据集适用于多种场景理解和重建任务,包括但不限于神经辐射场(NeRF)和高斯泼溅(Gaussian Splatting)等先进的重建方法。研究人员可以利用数据集提供的多模态标注进行模型训练和评估,特别是在复杂场景下的语义分割和深度估计任务中表现优异。此外,DSP度量可用于量化场景复杂度,指导方法选择和优化重建流程。
背景与挑战
背景概述
ClaraVid是由罗马尼亚克卢日-纳波卡技术大学的Radu Beche和Sergiu Nedevschi团队于2025年提出的综合性航空场景重建基准数据集。该数据集旨在解决低空无人机(UAV)影像在语义和几何场景理解中的关键问题,特别是在灾害响应、城市测绘和基础设施检测等应用中。ClaraVid包含16,917张高分辨率图像,覆盖多样化的城市、郊区和自然景观,提供密集深度图、全景分割、稀疏点云和动态对象掩码等多模态标注。通过优化的渲染流程,ClaraVid显著提升了场景重建和语义分割的保真度,成为航空测绘领域的重要基准。
当前挑战
ClaraVid面临的挑战主要体现在两个方面:领域问题挑战和构建过程挑战。在领域问题方面,航空场景重建需要处理复杂的环境结构、动态物体和多样化的视角,这对算法的鲁棒性和泛化能力提出了极高要求。构建过程中的挑战包括:1) 多模态标注的一致性维护,特别是在大规模场景中确保几何与语义标注的精确对齐;2) 高分辨率图像的渲染优化,需克服植被剔除和细节层次不一致等技术难题;3) 动态物体掩码的生成,这对时间相干性处理提出了特殊要求;4) 场景复杂度量化,团队创新性地提出基于微分熵分析的Delentropic场景剖面(DSP)指标,以解决传统启发式评估的局限性。
常用场景
经典使用场景
ClaraVid数据集在无人机航拍场景重建领域具有广泛的应用价值。该数据集通过多视角高分辨率图像采集,结合密集深度图、全景分割和动态物体掩模等多模态标注,为复杂城市场景的三维重建提供了丰富的数据支持。在神经辐射场(NeRF)和高斯泼溅(Gaussian Splatting)等先进重建算法的训练与评估中,ClaraVid展现了出色的性能,特别是在处理城市、郊区和自然景观等多样化环境时,其高保真度的数据质量显著提升了重建结果的几何与语义精度。
实际应用
在实际应用层面,ClaraVid数据集为城市测绘、灾害响应和基础设施检测等关键领域提供了可靠的技术支持。其仿真的无人机测绘工作流程可直接迁移至真实场景,数据集中的动态物体掩模特性特别适用于需要时空一致性的应用,如交通监控和城市规划。通过提供近似激光雷达扫描的多分辨率点云数据,该数据集还能有效支持自动驾驶和智慧城市等领域的算法开发,弥合了合成数据与真实应用场景之间的鸿沟。
衍生相关工作
ClaraVid数据集催生了一系列创新性研究工作。基于其提出的DSP度量,研究者开发了针对复杂场景的自适应神经重建管道,如动态调整网络容量的NeRF变体。在语义理解方面,该数据集推动了全景分割与神经场景表示的融合研究,衍生出Panoptic Neural Fields等代表性工作。此外,数据集的多视角特性启发了新型视图合成算法的开发,特别是在处理大基线无人机图像方面取得了突破性进展,相关成果已应用于Mega-NeRF和CityGaussian等大规模场景重建系统。
以上内容由遇见数据集搜集并总结生成


