RoboSpatial-Home
收藏Hugging Face2025-03-13 更新2025-03-14 收录
下载链接:
https://huggingface.co/datasets/chanhee-luke/RoboSpatial-Home
下载链接
链接失效反馈官方服务:
资源简介:
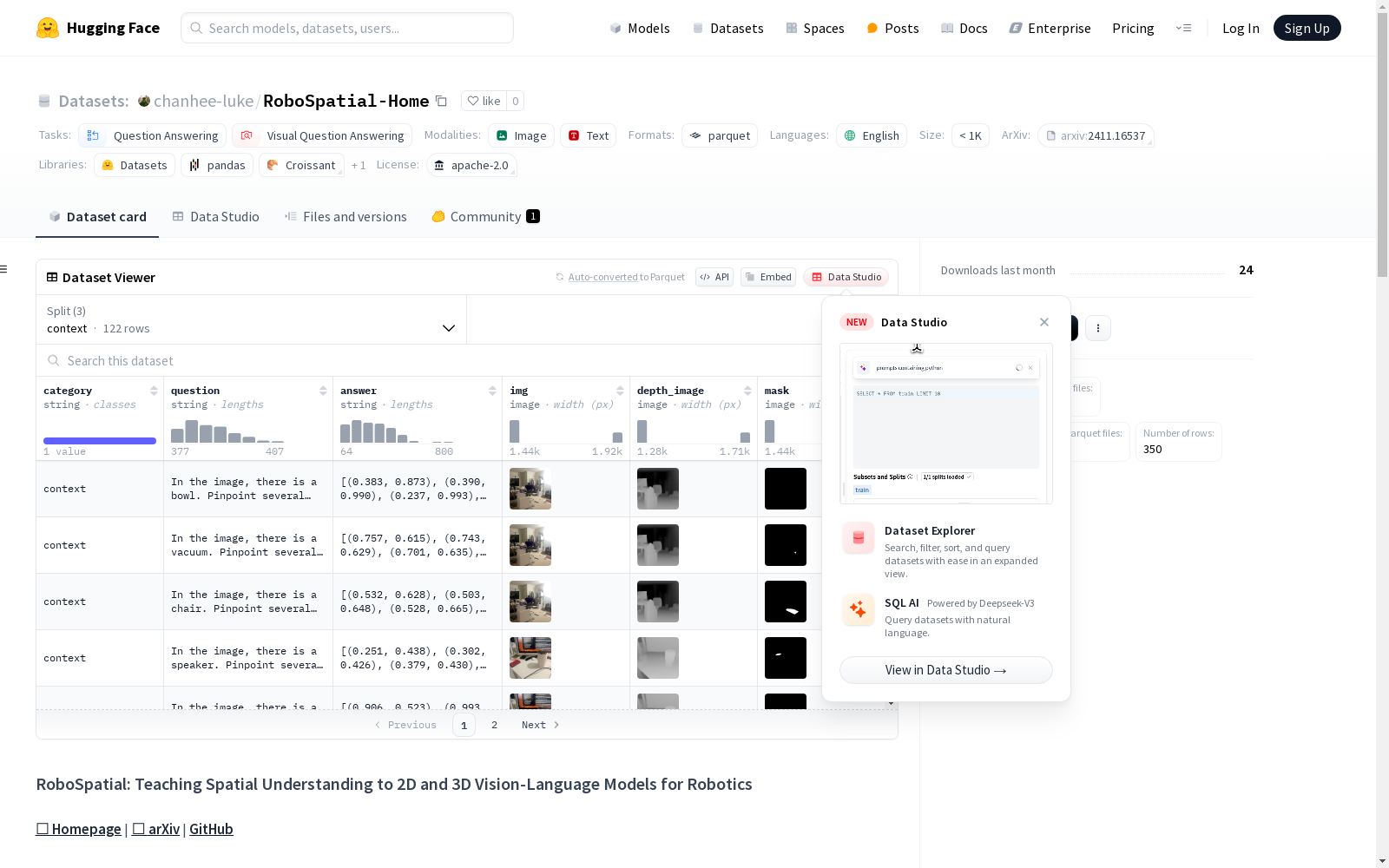
RoboSpatial-Home是一个针对机器人应用设计的空间推理基准数据集,包含了350个与手持iPhone相机配备深度传感器的RGBD图像相关联的空间推理问题。这些问题分为三种类型:空间配置、空间上下文和空间兼容性,旨在全面评估机器人应用中的空间理解能力。
RoboSpatial-Home is a spatial reasoning benchmark dataset designed for robotic applications, containing 350 spatial reasoning questions associated with RGBD images captured by a handheld iPhone camera equipped with a depth sensor. These questions are divided into three categories: spatial configuration, spatial context, and spatial compatibility, and the dataset aims to comprehensively assess spatial understanding capabilities in robotic applications.
创建时间:
2025-03-13
搜集汇总
数据集介绍
构建方式
RoboSpatial-Home数据集的构建,是通过手动收集与标注计算机科学研究生居住的家中真实环境所拍摄的RGBD图像,并配以空间推理问题的问答对。图像采用iPhone 13 Pro Max的深度传感器及摄像头捕捉,涵盖了室内环境中的各类空间关系情景。
特点
该数据集特色在于,其不仅包含了 RGB 图像,还提供了对应的深度图像,以及针对空间兼容性问题的分割掩码。它分为三个子集:空间配置、空间上下文和空间兼容性,每个子集针对不同的空间推理任务,如物体的相对位置、空余空间的识别以及物体放置的适宜性评估。
使用方法
使用RoboSpatial-Home数据集时,用户可以通过指定数据集名称及空间推理类别来加载数据。例如,通过调用load_dataset函数,传入数据集名称和所需的推理类别(configuration、context或compatibility),即可获得相应类别的数据。在使用和分发数据集时,需注意保护隐私和遵守伦理规范。
背景与挑战
背景概述
RoboSpatial-Home数据集,于2025年3月13日发布,是由计算机科学研究生手工收集和注释的数据集。该数据集旨在评估视觉语言模型在真实世界室内环境中的空间推理能力,其核心研究问题是提升机器人在空间理解方面的表现。该数据集由350个空间推理问题与手工采集的RGBD图像组成,图像使用配备深度传感器的iPhone手机拍摄。RoboSpatial-Home的发布,为机器人领域空间理解研究提供了新的基准,具有重要的学术影响力。
当前挑战
该数据集面临的挑战主要包括:1)领域问题方面的挑战,即如何使视觉语言模型准确理解和推理空间配置、空间上下文和空间兼容性;2)构建过程中的挑战,如确保图像采集的多样性和代表性,以及隐私和伦理问题的考量。此外,数据集的注释质量、模型泛化能力以及不同场景下的适应性也是研究者需要关注的重要问题。
常用场景
经典使用场景
RoboSpatial-Home数据集旨在评估视觉语言模型在真实室内环境中的空间推理能力,其经典使用场景主要集中于机器人领域。该数据集通过提供与RGBD图像配对的问答对,为模型训练和评估提供了一个综合平台,以实现对空间配置、空间上下文和空间兼容性等问题的理解和判断。
衍生相关工作
基于RoboSpatial-Home数据集,已衍生出一系列相关研究工作,如空间推理模型的创新设计、深度学习算法的优化,以及机器人视觉系统的改进等。这些研究进一步扩展了数据集的应用范围,为机器人领域的技术进步提供了坚实的数据支持。
数据集最近研究
最新研究方向
RoboSpatial-Home数据集作为空间推理领域的新基准,旨在评估视觉语言模型在真实室内环境中的表现。近期研究集中于利用该数据集对2D和3D视觉语言模型进行教学,以提升机器人在室内环境中的空间理解能力。该数据集包含了与RGBD图像配对的350个空间推理问题,涉及空间配置、空间上下文和空间兼容性三种类型,为机器人应用中的空间理解提供了全面的评估。RoboSpatial-Home的发布,不仅为视觉语言模型的研究提供了新的视角,而且对于推动机器人在复杂环境中的自主决策具有深远的影响。
以上内容由遇见数据集搜集并总结生成


