The Rosario Dataset
收藏arXiv2019-03-08 更新2024-06-21 收录
下载链接:
http://www.cifasis-conicet.gov.ar/robot/
下载链接
链接失效反馈官方服务:
资源简介:
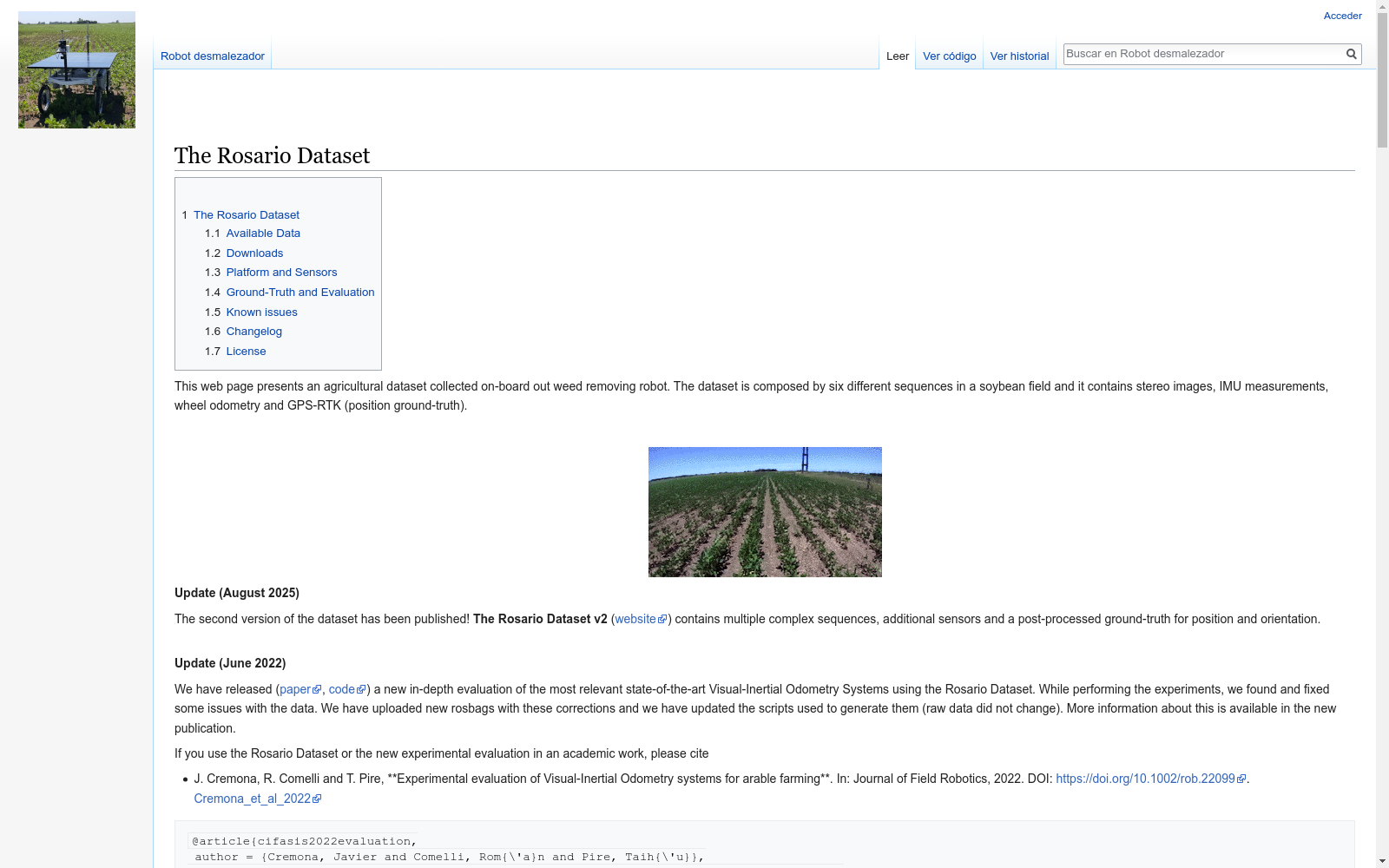
The Rosario Dataset是由法国阿根廷国际信息与系统科学中心(CONICET-UNR)创建的,旨在为农业环境中的自主移动机器人提供传感器数据。该数据集包含6个序列,记录于大豆田中,展示了高度重复的场景、反射和由直射阳光引起的烧焦图像以及粗糙地形等真实且具有挑战性的情况。数据集包含轮式里程计、IMU、立体相机和GPS-RTK系统的同步读数,旨在为农业SLAM/里程计和传感器融合研究提供基准。该数据集的应用领域主要集中在农业自动化,特别是机器人定位和环境映射,以提高农业生产效率并减轻人们的劳动强度。
The Rosario Dataset was developed by the French-Argentine International Center for Information and Systems Sciences (CONICET-UNR) to provide sensor data for autonomous mobile robots in agricultural environments. This dataset contains six sequences recorded in a soybean field, capturing realistic and challenging scenarios including highly repetitive scenes, reflections, burnt images caused by direct sunlight, and rough terrain. It includes synchronized readings from wheel odometry, IMU, stereo cameras, and a GPS-RTK system, serving as a benchmark for agricultural SLAM/odometry and sensor fusion research. The primary application domains of this dataset focus on agricultural automation, particularly robot localization and environmental mapping, to improve agricultural production efficiency and reduce human labor intensity.
提供机构:
法国阿根廷国际信息与系统科学中心(CONICET-UNR)
创建时间:
2018-09-18
搜集汇总
数据集介绍
构建方式
The Rosario Dataset is meticulously assembled to cater to the burgeoning field of agricultural robotics, specifically addressing the challenges of localization and mapping in agricultural environments. The dataset comprises six sequences of sensor data, recorded within soybean fields, which encapsulate the complexities of agricultural settings such as repetitive scenes, sunlight-induced reflections and burns, and rugged terrains. The data is synchronized and includes readings from a variety of sensors including wheel odometry, IMU, stereo camera, and GPS-RTK system, ensuring a comprehensive dataset for research in agricultural SLAM/odometry and sensor fusion.
特点
This dataset stands out for its diverse and challenging agricultural scenarios, which are crucial for developing robust algorithms tailored to agricultural environments. The data is characterized by its synchronization, calibration, and variety of sensor readings, providing a benchmark for evaluating and improving localization and mapping algorithms. The inclusion of ground truth from GPS-RTK and the use of stereo cameras make this dataset particularly valuable for visual SLAM research. The dataset is publicly available, fostering collaboration and advancement in agricultural robotics.
使用方法
To utilize the Rosario Dataset, researchers can access the raw data and processed rosbags, which contain sensor readings formatted as standard ROS messages. This facilitates the integration of the dataset with ROS-based software and tools. The dataset includes scripts for generating ROS messages and parsing calibration parameters, aiding in the manipulation of raw data for replication of results and further analysis. Researchers can leverage the dataset to evaluate existing algorithms, develop new ones, and contribute to the advancement of agricultural robotics by addressing the specific challenges presented by agricultural environments.
背景与挑战
背景概述
在农业自动化领域中,机器人的定位和地图构建是至关重要的研究课题。为了推动这一领域的研究,研究人员 Taihú Pire, Martín Mujica, Javier Civera 和 Ernesto Kofman 于 2016 年创建了 Rosario 数据集。该数据集旨在提供一个农业环境中机器人定位和地图构建的基准测试平台,并促进农业 SLAM/测距和传感器融合研究。Rosario 数据集包含了 6 个在黄豆田中记录的序列,展示了高度重复的场景、由直接阳光引起的反射和烧焦图像以及崎岖的地形等真实且具有挑战性的案例。数据集包含了轮式里程计、IMU、立体相机和 GPS-RTK 系统的同步读取数据,为农业机器人研究提供了宝贵的数据资源。
当前挑战
Rosario 数据集所面临的挑战主要集中在两个方面:一是所解决的领域问题,即农业环境中的定位和地图构建,这需要解决农业环境中特有的纹理不足、非刚性运动、光照变化等问题;二是构建过程中所遇到的挑战,例如,如何确保数据的质量和一致性,如何处理传感器融合过程中的数据同步和校准问题等。为了解决这些挑战,研究人员采用了多种技术和方法,例如使用立体相机、IMU 和 GPS-RTK 系统进行数据采集,采用 Kalibr 工具进行传感器校准,以及使用 ROS 消息格式进行数据同步等。通过这些方法,Rosario 数据集成功地展示了农业环境中定位和地图构建的挑战,并为相关研究提供了宝贵的数据资源。
常用场景
经典使用场景
The Rosario Dataset, a comprehensive collection of multisensor data recorded in agricultural environments, is designed to facilitate research in autonomous mobile robotics. Its primary application lies in the fields of Simultaneous Localization and Mapping (SLAM) and odometry, specifically within the context of agricultural robotics. The dataset provides synchronized readings from various sensors, including wheel odometry, Inertial Measurement Unit (IMU), stereo camera, and GPS-RTK system, offering a wealth of information for researchers to develop and evaluate algorithms that can navigate and map challenging agricultural terrains. This includes scenarios with highly repetitive scenes, direct sunlight-induced reflections, and uneven terrain, all of which are common in agricultural settings.
实际应用
The practical applications of The Rosario Dataset are vast and directly impact the field of precision agriculture. By enabling the development of more accurate SLAM and odometry algorithms, the dataset supports the creation of autonomous agricultural robots that can navigate fields with precision, avoiding obstacles and efficiently mapping the environment. This technology is crucial for tasks such as weed removal, crop monitoring, and yield estimation. The dataset's contribution to improving autonomous navigation and mapping in agricultural settings has the potential to revolutionize farming practices, leading to increased productivity, reduced labor costs, and more sustainable agricultural operations.
衍生相关工作
The Rosario Dataset has inspired a range of derivative works and further research in the field of agricultural robotics. Researchers have used this dataset to develop and test new algorithms for SLAM and odometry, focusing on improving performance in agricultural environments. The dataset's comprehensive sensor data and challenging scenarios have also been utilized in educational settings to train future roboticists in the complexities of autonomous navigation and mapping. Furthermore, the dataset has paved the way for the development of more sophisticated agricultural robots capable of performing a variety of tasks, from precision spraying to automated harvesting, contributing to the growth of precision agriculture and the advancement of autonomous systems in challenging outdoor environments.
以上内容由遇见数据集搜集并总结生成


