LayeredFlow
收藏arXiv2024-09-09 更新2024-09-11 收录
下载链接:
https://layeredflow.cs.princeton.edu
下载链接
链接失效反馈官方服务:
资源简介:
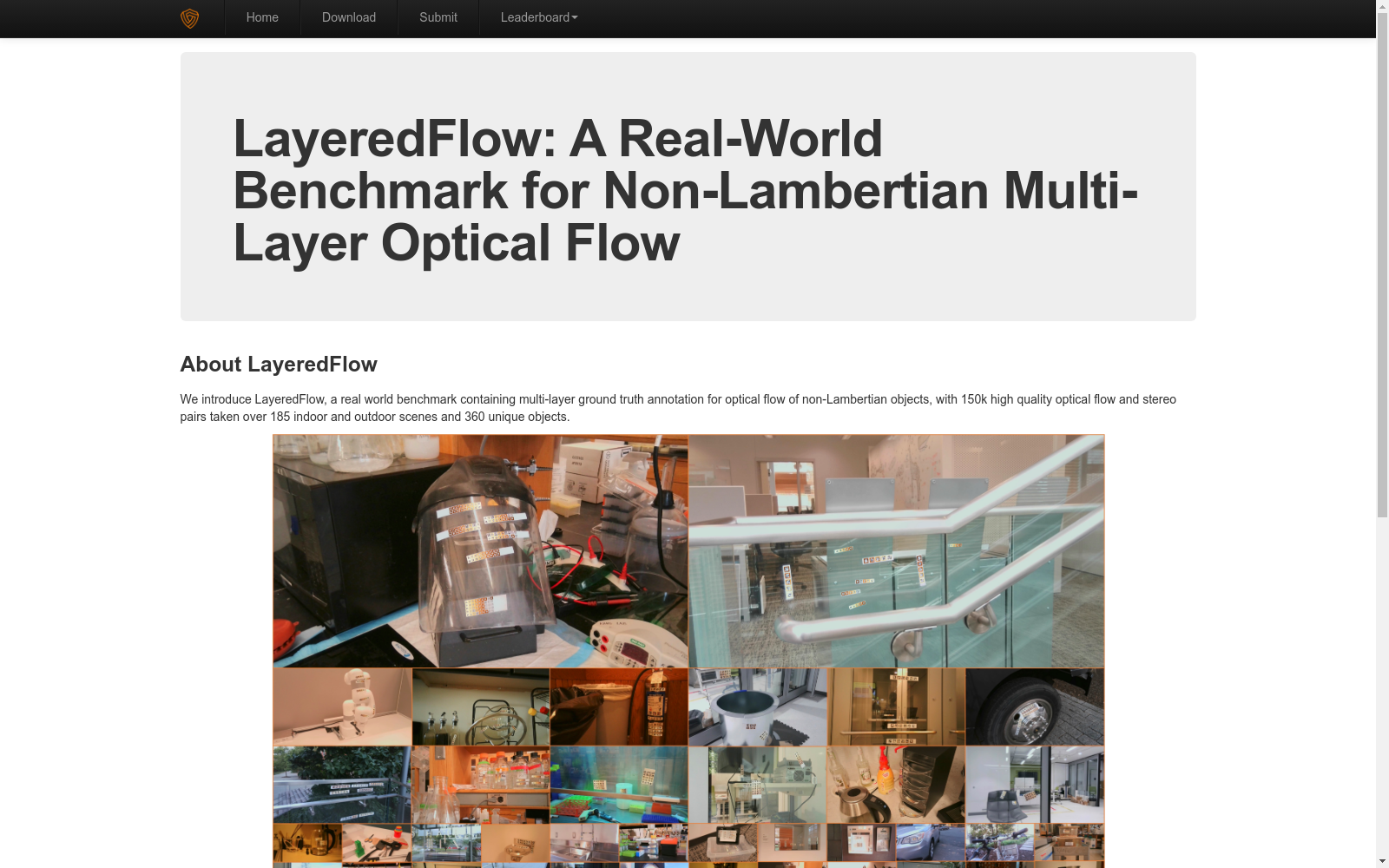
LayeredFlow是由普林斯顿大学创建的一个真实世界基准数据集,专注于非朗伯体对象的多层光流注释。该数据集包含150,000个高质量的光流和立体对,覆盖185个室内外场景和360个独特物体。数据集的创建过程结合了立体相机系统和AprilTag视觉标记系统,以确保多层几何注释的准确性。LayeredFlow主要应用于计算机视觉领域,旨在解决非朗伯体对象的光流预测问题,特别是在透明表面存在时的多层光流估计。
LayeredFlow is a real-world benchmark dataset created by Princeton University, focusing on multi-layer optical flow annotations for non-Lambertian objects. This dataset contains 150,000 high-quality optical flow and stereo pairs, covering 185 indoor and outdoor scenes and 360 unique objects. The dataset was developed by combining a stereo camera system and AprilTag visual marker system to ensure the accuracy of multi-layer geometric annotations. Primarily applied in the field of computer vision, LayeredFlow aims to solve the optical flow prediction problem for non-Lambertian objects, particularly multi-layer optical flow estimation in the presence of transparent surfaces.
提供机构:
普林斯顿大学
创建时间:
2024-09-09
原始信息汇总
LayeredFlow 数据集概述
数据集简介
- 名称: LayeredFlow
- 描述: LayeredFlow 是一个包含非朗伯多层光流真实标注的现实世界基准数据集,包含15万个高质量的光流和立体对,涵盖185个室内外场景和360个独特物体。
数据集内容
- 场景数量: 185个室内外场景
- 物体数量: 360个独特物体
- 数据对数量: 15万个高质量光流和立体对
相关资源
- 论文:
- 标题: LayeredFlow: A Real-World Benchmark for Non-Lambertian Multi-Layer Optical Flow
- 作者: Hongyu Wen, Erich Liang, Jia Deng
- 会议: European Conference on Computer Vision (ECCV), 2024
- 链接: Paper
- 代码: GitHub
- Bibtex: Bibtex
数据集下载
- 链接: Download
致谢
- 支持机构: 国家科学基金会 (NSF)
- 特别感谢:
- Erich Liang 获得 NSF GRFP (2146752) 支持
- 普林斯顿大学的朋友和同事
- 分子生物学实验室的 Yibin Kang 教授及其学生
搜集汇总
数据集介绍
构建方式
LayeredFlow数据集的构建方法独具匠心,它采用了AprilTag视觉标记系统和立体相机系统来捕获真实世界场景中非朗伯对象的精确光流和立体图像对。通过在场景中放置和移除AprilTag标记,研究人员能够获取被透明表面遮挡的对象的多层真实光流和立体测量数据。这一过程允许捕获多层地面真实数据,从而为光流任务提供了前所未有的深度信息。此外,为了丰富数据集的多样性,LayeredFlow涵盖了185个室内和室外场景以及360个独特的对象,共拍摄了2000张图像,并生成了15万个高质量的光流和立体图像对。
特点
LayeredFlow数据集的特点在于其多样性、真实性和多层标注。它包含了丰富的场景和对象类型,从日常家居物品到实验室设备,再到室外建筑,展现了广泛的应用场景。此外,该数据集是首个提供多层光流标注的真实世界数据集,这对于理解非朗伯对象的三维信息至关重要。透明表面的多层信息捕获,使得LayeredFlow在评估和训练光流算法方面具有独特的优势。
使用方法
LayeredFlow数据集的使用方法包括评估现有光流算法的性能,以及训练和微调模型以预测多层光流。研究者可以下载数据集,并在其上运行各种光流算法,以评估它们在处理非朗伯对象时的准确性。此外,LayeredFlow还提供了一个大规模的合成数据集,包含60k张图像,可用于训练模型以预测多层光流。通过在合成数据集上训练,模型可以学习到如何处理非朗伯表面,并在真实世界数据集上进行微调,从而提高其在复杂场景中的性能。
背景与挑战
背景概述
LayeredFlow数据集的创建旨在解决非朗伯物体三维理解的重要任务。这些物体在现实世界的许多应用中都有出现,例如自动驾驶导航和机器人操作。然而,现有的算法在处理这些物体时往往表现不佳。这一领域的主要障碍之一是缺乏全面的非朗伯基准数据集。大多数基准数据集的场景和物体多样性较低,且没有为被透明表面遮挡的物体提供多层三维注释。LayeredFlow是一个包含非朗伯物体光流的多层真实世界基准数据集,提供了150k高质量的光流和立体对,涵盖了185个室内外场景和360个独特物体。该数据集的创建时间为2024年9月,主要研究人员来自普林斯顿大学计算机科学系,包括Hongyu Wen、Erich Liang和Jia Deng。LayeredFlow数据集对相关领域的影响力在于,它提供了多层数据集,有助于研究非朗伯物体的三维理解,并推动了多层光流预测的研究。
当前挑战
LayeredFlow数据集的挑战主要在于非朗伯物体的三维理解,这是一个重要的任务,因为它们出现在许多现实世界应用中。然而,许多在漫反射表面表现良好的技术在处理非朗伯表面时往往难以捕捉准确的信息。传统的深度测量方法,如光照和飞行时间技术,对表面的反射特性高度敏感,无法为非朗伯物体生成可靠的3D信息。同样,针对光流和立体匹配等问题的数据驱动算法在漫反射物体上表现良好,但往往在非朗伯物体上表现不佳。此外,现有的非朗伯基准数据集在数据多样性方面存在问题。大多数基准场景仅限于室内环境,非朗伯物体通常是小型桌面物体。为了获得这些物体的准确3D真实数据,一些工作使用预扫描的3D模型,而其他工作则将物体涂上朗伯漆以辅助对应检测。这些基准设计选择限制了潜在物体的多样性,并使得数据收集过程难以扩展。更重要的是,现有的非朗伯基准数据集在存在透明表面时没有提供多层数据。然而,当拍摄透明物体时,单个像素可以捕捉到场景中多个3D点的信息:透明表面上的一个点以及被遮挡物体后面的点。在这些情况下,人类通常能够推断出多个深度层的3D信息。如果我们希望构建具有类似3D场景理解水平的算法,那么在真实世界基准中包含多层3D数据是必要的。
常用场景
经典使用场景
LayeredFlow数据集的创建旨在解决现实世界中非朗伯材质物体三维理解的关键问题。该数据集包含了对非朗伯材质物体的多层光流和立体对的真实标注,适用于计算机视觉和机器人领域的研究。该数据集的多样性使其成为评估和训练光流算法的理想选择,特别是在自动驾驶、机器人操作等对精确三维信息有高需求的场景中。
衍生相关工作
LayeredFlow数据集的发布促进了一系列相关研究的发展。首先,该数据集推动了多层光流预测任务的研究,这是一个新的研究方向,旨在预测透明物体背后物体的光流。其次,LayeredFlow数据集的创建和使用启发了一些新的算法和模型的设计,例如基于RAFT的多层光流预测模型。此外,LayeredFlow数据集的发布也促进了计算机视觉和机器人领域对非朗伯材质物体三维理解的研究,为未来的研究提供了重要的数据和工具。
数据集最近研究
最新研究方向
LayeredFlow数据集的引入,为非朗伯表面光流研究提供了一个真实世界的基准。该数据集包含150k高质量的光流和立体对,覆盖了185个室内外场景和360个独特的物体,展示了场景和物体的多样性。LayeredFlow的引入,使得研究人员能够更好地理解和解决非朗伯表面的光流问题,这对于自动驾驶、机器人等领域具有重要意义。同时,LayeredFlow数据集还提出了一个新的任务,即多层光流,并引入了一个大规模的合成数据集,以提供训练数据。通过在合成数据集上训练,模型能够预测多层光流,而无需牺牲在漫反射物体上的性能。
相关研究论文
- 1LayeredFlow: A Real-World Benchmark for Non-Lambertian Multi-Layer Optical Flow普林斯顿大学 · 2024年
以上内容由遇见数据集搜集并总结生成


