ShareRobot
收藏ShareRobot 数据集概述
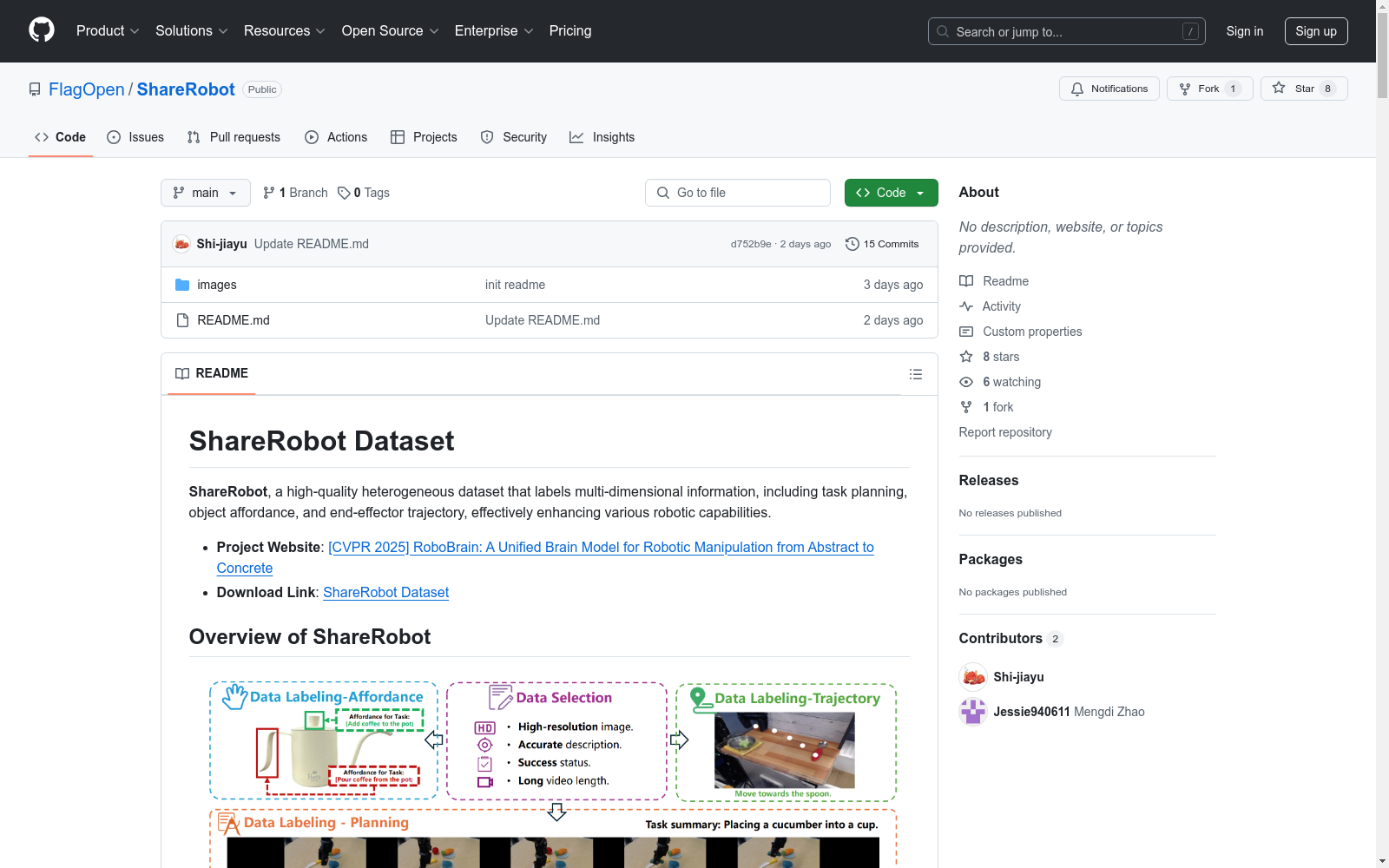
数据集简介
- 名称: ShareRobot
- 类型: 高质量异构数据集
- 标注维度: 任务规划、物体可供性、末端执行器轨迹
- 目标: 增强机器人多维度能力
关键数据量
- 规划数据:
- 51,403个片段
- 每个片段30帧
- 转化为1,027,990个问答对
- 可供性数据:
- 6,522张图像
- 每张图像包含与指令对齐的可供性区域
- 轨迹数据:
- 6,870张图像
- 每张图像包含至少3个{x,y}坐标点
数据来源
- 原始数据集数量: 23个(来自Open X-Embodiment数据集)
- 涵盖内容:
- 12种执行体
- 107种原子任务类型
规划原始数据集
| 数据集名称 | 数据量 |
|---|---|
| nyu_door_opening_surprising_effectiveness | 421 |
| bridge | 15738 |
| dlr_edan_shared_control_converted_externally_to_rlds | 63 |
| ...(共23个数据集) | ... |
可供性原始数据集
| 数据集名称 | 数据量 |
|---|---|
| utokyo_pr2_tabletop_manipulation_converted_externally_to_rlds | 24 |
| utokyo_xarm_pick_and_place_converted_externally_to_rlds | 23 |
| ...(共19个数据集) | ... |
| 总计 | 6522 |
轨迹原始数据集
| 数据集名称 | 数据量 |
|---|---|
| utokyo_pr2_tabletop_manipulation_converted_externally_to_rlds | 35 |
| utokyo_xarm_pick_and_place_converted_externally_to_rlds | 36 |
| ...(共18个数据集) | ... |
| 总计 | 6870 |
数据格式示例
规划数据
json { "id": "...", "task": "Future_Prediction_Task", "selected_step": 3, "conversations": [ { "from": "human", "value": "<image 0-25> After <move the grasped banana towards the mug>, whats the most probable next event?" }, { "from": "gpt", "value": "<place the banana into the mug>" } ], "image": ["/path/to/image_0-25"] }
可供性数据
json { "id": 2486, "meta_data": { "original_dataset": "bridge", "original_width": 640, "original_height": 480 }, "instruction": "place the red fork to the left of the left burner", "affordance": { "x": 352.87425387858815, "y": 186.47871614766484, "width": 19.296008229513156, "height": 14.472006172134865 } }
轨迹数据
json { "id": 456, "meta_data": { "original_dataset": "bridge", "original_width": 640, "original_height": 480 }, "instruction": "reach for the carrot", "points": [ [265.45454545454544, 120.0], [275.1515151515152, 162.42424242424244], [280.0, 213.33333333333331], [280.0, 259.3939393939394] ] }
可视化代码
- 提供Python代码示例用于可视化可供性和轨迹数据
相关资源
- 项目网站: [CVPR 2025] RoboBrain: A Unified Brain Model for Robotic Manipulation from Abstract to Concrete
- 下载链接: ShareRobot Dataset
引用格式
@article{ji2025robobrain, title={RoboBrain: A Unified Brain Model for Robotic Manipulation from Abstract to Concrete}, author={Ji, Yuheng and Tan, Huajie and Shi, Jiayu and Hao, Xiaoshuai and Zhang, Yuan and Zhang, Hengyuan and Wang, Pengwei and Zhao, Mengdi and Mu, Yao and An, Pengju and others}, journal={arXiv preprint arXiv:2502.21257}, year={2025} }