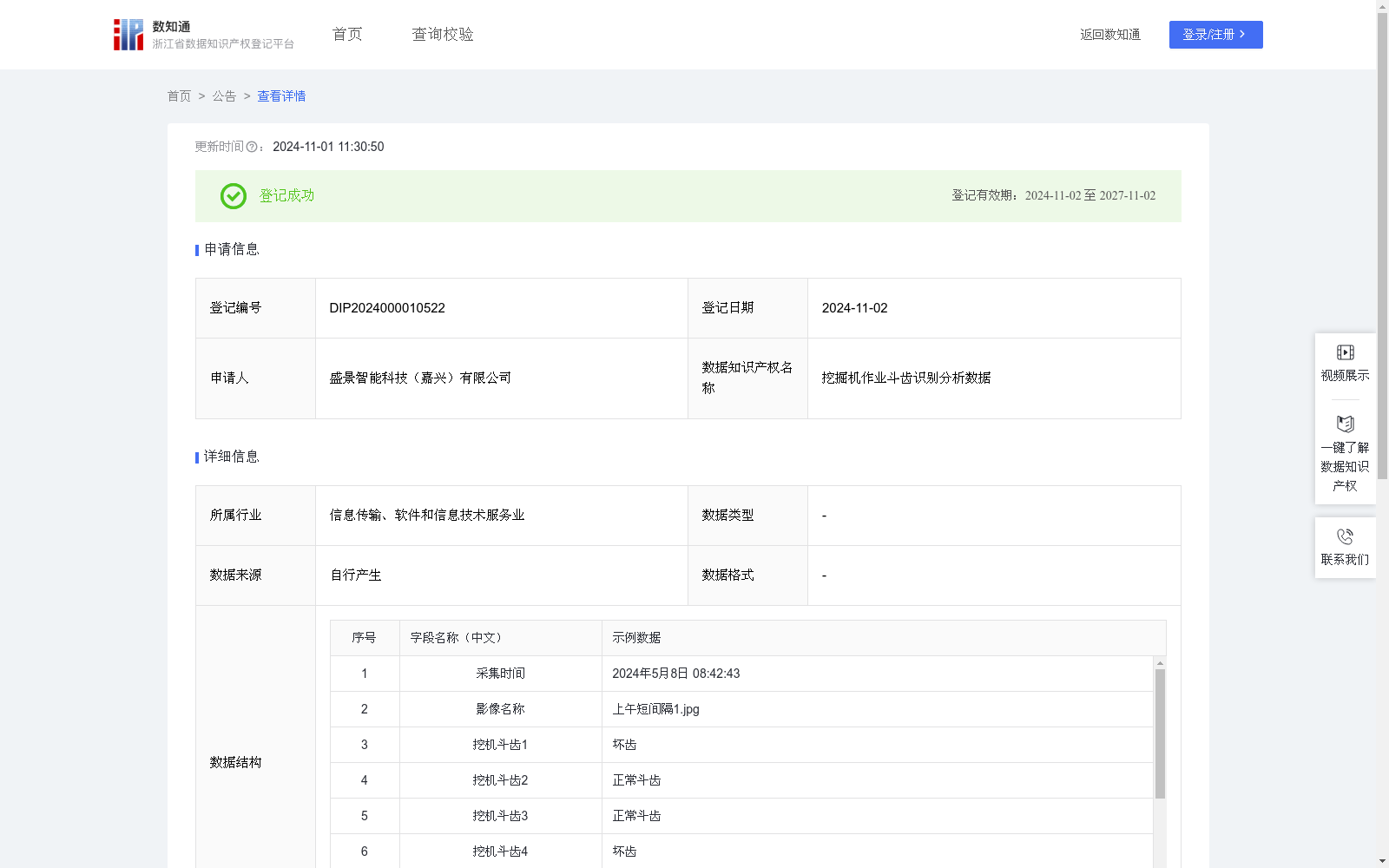
挖掘机作业斗齿识别分析数据
收藏浙江省数据知识产权登记平台2024-11-01 更新2024-11-02 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/79462
下载链接
链接失效反馈官方服务:
资源简介:
该数据主要用来捕捉挖掘机在作业过程中斗齿断裂或脱落的情况,如发现上述情况,则通过声光报警来提醒作业人员及时处理。斗齿断裂或脱落不仅会影响生产进度,还可能对操作人员和设备安全造成威胁。该算法可广泛用于挖机作业现场如建筑工地、道路施工、矿山开采、堆场物流等场景。通过斗齿识别分析预警,可以及时发现并处理斗齿断裂或脱落问题,减少事故风险,保障作业和人员安全。采用目标检测方法(如常见的深度学习检测框架)对视频中的挖掘机进行分析。首先,对输入图像或视频帧I进行处理,以识别感兴趣的候选区域B=D(I)。在检测到某个特定区域b∈B后,通过分类函数S(b)确定其属性状态s_b=S(b),其中状态类别包含多个明确定义的情况。若判定为某特定属性(例如“空斗”状态),则进一步对其细节特征进行深入分析,识别并提取该区域内的斗齿集合T_b=detect_teeth(b)。随后计算每个斗齿单元的特定度量l_t=length(t)和相邻斗齿单元的距离d(t_i,t_(i+1))=distance(t_i,t_(i+1)),以评估其状态是否存在异常。当斗齿单元的某项特定指标低于相应基准的设定比例阈值时,可能存在异常,如断裂或磨损。同样地,当相邻斗齿单元之间的某项关系指标超出正常范围的设定比例时,可能表明存在斗齿缺失或脱落的情况。训练此类模型需要一组带标注的图像数据集,其中标注类别包括“满斗状态”、“空斗状态”、“正常斗齿”、“异常斗齿”以及“未知状态斗齿”。为了增强算法在复杂环境中的稳定性,数据集还应包含不含铲斗的背景图片。
This dataset is primarily designed to capture bucket tooth breakage or detachment during excavator operation, and trigger audible and visual alarms to remind operators to handle the issue promptly once such anomalies are found. Bucket tooth breakage or detachment not only disrupts production progress but also poses threats to the safety of operators and equipment. This algorithm can be widely applied to excavator operation scenarios such as construction sites, road construction, mining operations, yard logistics and other working sites. Through bucket tooth recognition, analysis and early warning, problems such as bucket tooth breakage or detachment can be detected and addressed in a timely manner, reducing accident risks and ensuring operational and personnel safety. The analysis of excavators in videos adopts object detection methods (such as common deep learning-based detection frameworks). First, the input image or video frame I is processed to identify candidate regions of interest B=D(I). After detecting a specific region b ∈ B, its attribute state s_b=S(b) is determined via the classification function S(b), where the state categories include multiple clearly defined cases. If a specific attribute is determined (e.g., "empty bucket state"), in-depth analysis of its detailed features is further conducted to identify and extract the bucket tooth set T_b=detect_teeth(b) within this region. Subsequently, specific metrics for each bucket tooth unit are calculated, including l_t=length(t) and the distance between adjacent bucket tooth units d(t_i,t_{i+1})=distance(t_i,t_{i+1}), to evaluate whether there are anomalies in their states. When a specific metric of a bucket tooth unit falls below the set proportional threshold of the corresponding benchmark, anomalies such as breakage or wear may exist. Similarly, when a relational metric between adjacent bucket tooth units exceeds the set proportional range of normal conditions, it may indicate bucket tooth missing or detachment. Training such models requires a set of annotated image datasets, where the annotation categories include "full bucket state", "empty bucket state", "normal bucket teeth", "abnormal bucket teeth" and "bucket teeth in unknown state". To enhance the stability of the algorithm in complex environments, the dataset should also include background images without excavator buckets.
提供机构:
盛景智能科技(嘉兴)有限公司
创建时间:
2024-09-30
搜集汇总
数据集介绍
特点
该数据集包含591条挖掘机作业斗齿状态记录,每日更新,用于识别斗齿断裂或脱落情况,保障作业安全。应用场景广泛,包括建筑工地、矿山开采等。
以上内容由遇见数据集搜集并总结生成


