Transparent Object Tracking Benchmark (TOTB)
收藏arXiv2021-08-02 更新2024-06-21 收录
下载链接:
https://hengfan2010.github.io/projects/TOTB/
下载链接
链接失效反馈官方服务:
资源简介:
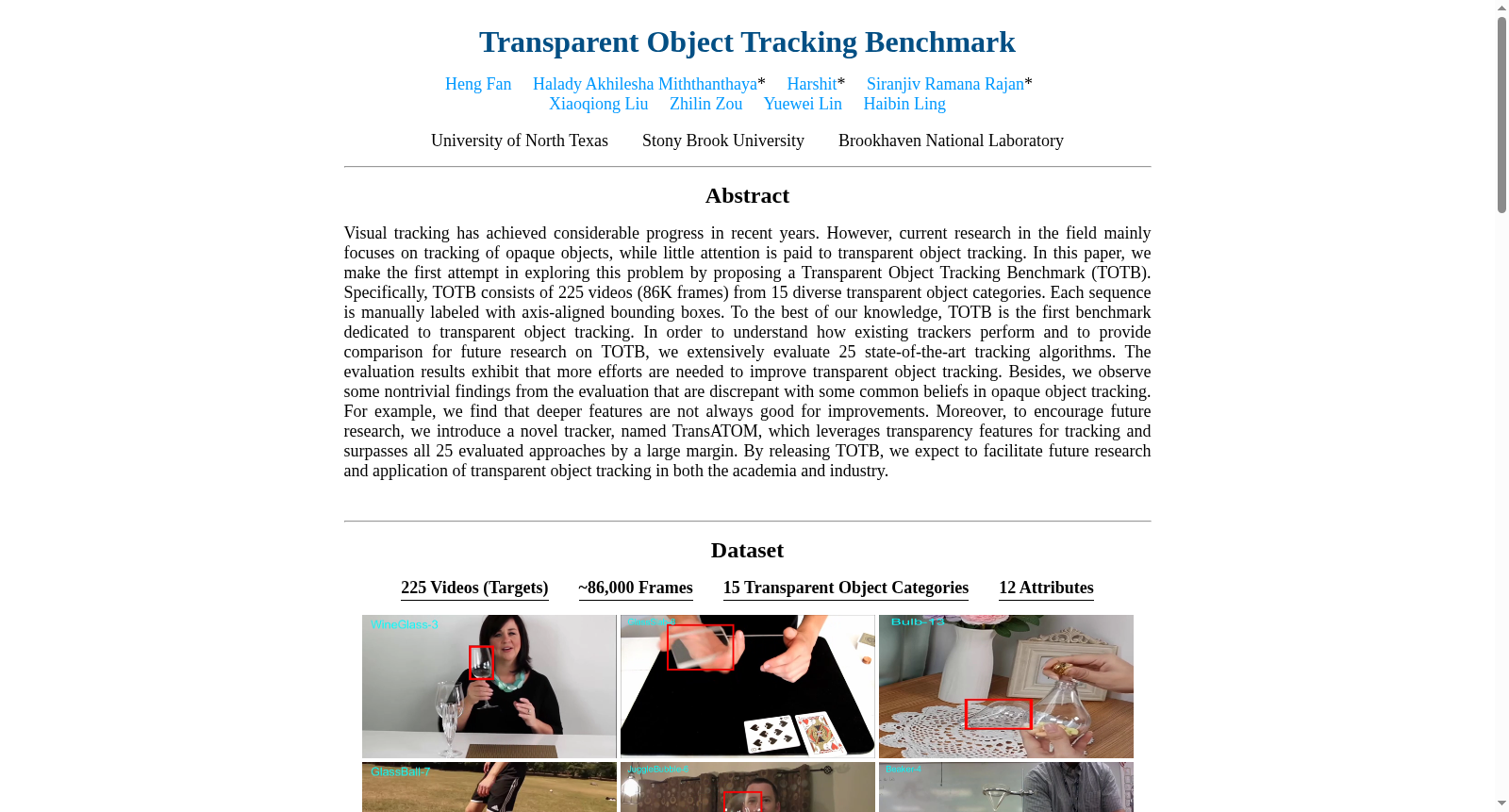
Transparent Object Tracking Benchmark (TOTB) 是首个专门针对透明物体跟踪的基准数据集,由石溪大学计算机科学系创建。该数据集包含225个视频序列,总计86,000帧,涵盖15种不同类型的透明物体。每个视频序列均由人工标注,使用轴对齐的边界框。TOTB的创建旨在解决透明物体跟踪领域的挑战,特别是在机器人视觉和人类机器交互中的应用。数据集通过从YouTube收集原始视频并进行精细筛选和标注,确保了数据的质量和适用性。TOTB的应用领域广泛,旨在推动透明物体跟踪技术的发展,解决实际应用中的复杂问题。
Transparent Object Tracking Benchmark (TOTB) is the first dedicated benchmark dataset for transparent object tracking, developed by the Department of Computer Science at Stony Brook University. Comprising 225 video sequences with a total of 86,000 frames, the dataset covers 15 distinct types of transparent objects. Each video sequence is manually annotated using axis-aligned bounding boxes. The creation of TOTB aims to address the core challenges in the field of transparent object tracking, particularly for applications in robotic vision and human-machine interaction. The dataset is constructed by collecting raw videos from YouTube, followed by rigorous screening and annotation to ensure data quality and applicability. With a wide range of application scenarios, TOTB is designed to promote the advancement of transparent object tracking technologies and solve complex problems in real-world practical applications.
提供机构:
石溪大学计算机科学系
创建时间:
2020-11-22
搜集汇总
数据集介绍
构建方式
透明物体追踪是计算机视觉领域中一个极具挑战性的课题,因其外观高度依赖背景,传统追踪方法难以有效应对。为填补这一空白,研究者构建了透明物体追踪基准(TOTB)。该数据集从YouTube平台收集原始视频,经严格筛选后,选取15类常见的透明物体(如烧杯、玻璃杯、灯泡等),每类包含15个序列,共计225个视频片段,涵盖86K帧图像。每个序列均由专业标注人员依据轴对齐边界框进行手工标注,并采用三级策略(人工标注、视觉核查、框体精修)确保标注质量,同时为每个视频标注了12种属性标签(如旋转、遮挡、尺度变化等)以支持细粒度分析。
特点
TOTB作为首个专为透明物体追踪设计的基准数据集,具有鲜明的特性。其核心挑战在于透明物体的外观弱化与背景融合现象,这与传统不透明物体追踪形成鲜明对比。数据集涵盖丰富的透明物体类别与多样化的运动场景,且每个序列均标注了12种挑战属性,其中旋转、尺度变化和部分遮挡最为常见。有趣的是,评估结果显示,在透明物体追踪中,深层特征并非总能带来性能提升,这一发现颠覆了不透明物体追踪领域的普遍认知。此外,数据集中目标外观随背景剧烈变化的特点,为算法设计提出了独特考验。
使用方法
TOTB遵循单次评估协议,采用精确率、归一化精确率和成功率作为评价指标,并提供了25种先进追踪算法的全面评估结果作为基线。研究者可直接下载数据集,在225个序列上测试其追踪算法,并利用12种属性标签进行分维度性能分析。为促进透明物体追踪研究,论文还提出了TransATOM追踪器,通过融合透明度特征与视觉特征实现鲁棒定位。该透明度特征具备良好的可迁移性,可集成至其他追踪框架中。数据集、评估代码及基线模型均已开源,便于学术与工业界开展公平比较与算法改进。
背景与挑战
背景概述
视觉目标跟踪是计算机视觉领域的基础性研究课题,在机器人、人机交互与视频分析等应用中扮演着关键角色。尽管近年来该领域取得了长足进步,现有研究却几乎全部聚焦于不透明物体的跟踪,而透明物体因具有弱外观、与背景高度融合等独特属性,其跟踪问题长期被忽视。为填补这一空白,Heng Fan 等人于2021年联合北德克萨斯大学与石溪大学等机构,首次提出了透明物体跟踪基准 TOTB。该基准包含225个视频序列(约8.6万帧),涵盖15类常见透明物体(如玻璃杯、灯泡等),并提供了精确的轴对齐边界框标注。TOTB 的发布不仅为透明物体跟踪提供了统一的评估平台,更揭示了现有算法在该任务上的显著不足,从而推动了这一新兴研究方向的发展。
当前挑战
透明物体跟踪面临的核心挑战在于其外观高度依赖背景,导致目标与背景的可区分性极差;即便目标缓慢移动,背景变化也会引发外观剧烈改变,进一步加剧跟踪难度。此外,构建 TOTB 本身亦充满挑战:首先,透明物体的弱纹理与反射特性使得手工标注边界框极为困难,需采用多轮人工标注与交叉验证策略以保证质量;其次,现有跟踪算法多针对不透明物体设计,在透明场景中性能大幅下降,如深度特征不仅未能提升表现,反而可能降低精度;最后,透明物体数据匮乏,需从海量视频中筛选并确保类别多样性,这增加了数据收集与筛选的复杂度。
常用场景
经典使用场景
在视觉追踪领域,透明物体因其外观与背景高度融合、纹理信息微弱而成为极具挑战性的研究对象。TOTB作为首个专为透明物体追踪设计的基准数据集,为研究者提供了一个系统评估追踪算法在透明场景下性能的标准化平台。经典使用场景包括对玻璃瓶、灯泡、酒杯等15类常见透明物体的单目标追踪任务,涵盖旋转、部分遮挡、尺度变化等12种复杂属性,全面检验算法在弱外观特征下的鲁棒性与精度。
实际应用
在实际应用中,TOTB为机器人视觉与人机交互系统提供了关键技术支持。例如,服务机器人需实时追踪人类手中的透明水杯以理解动作意图,或工业生产线需对透明玻璃制品进行动态定位与分拣。该数据集推动的透明物体追踪技术可显著提升智能系统在透明场景下的感知能力,助力医疗、零售、家庭服务等领域的自动化与智能化进程。
衍生相关工作
基于TOTB,研究者提出了多项衍生工作,最具代表性的是TransATOM追踪器,通过显式学习透明特征并与传统分类特征融合,在TOTB上显著超越所有基线方法。此外,透明特征被证明具有良好的可迁移性,可集成至DiMP、KYS等先进追踪框架中,分别带来1.9%与2.2%的性能提升。这些工作为透明物体追踪的未来发展奠定了坚实基础,并启发了更多针对弱纹理目标的特征学习研究。
以上内容由遇见数据集搜集并总结生成


