Fourier ActionNet Dataset
收藏github2025-03-17 更新2025-04-16 收录
下载链接:
官方服务:
资源简介:
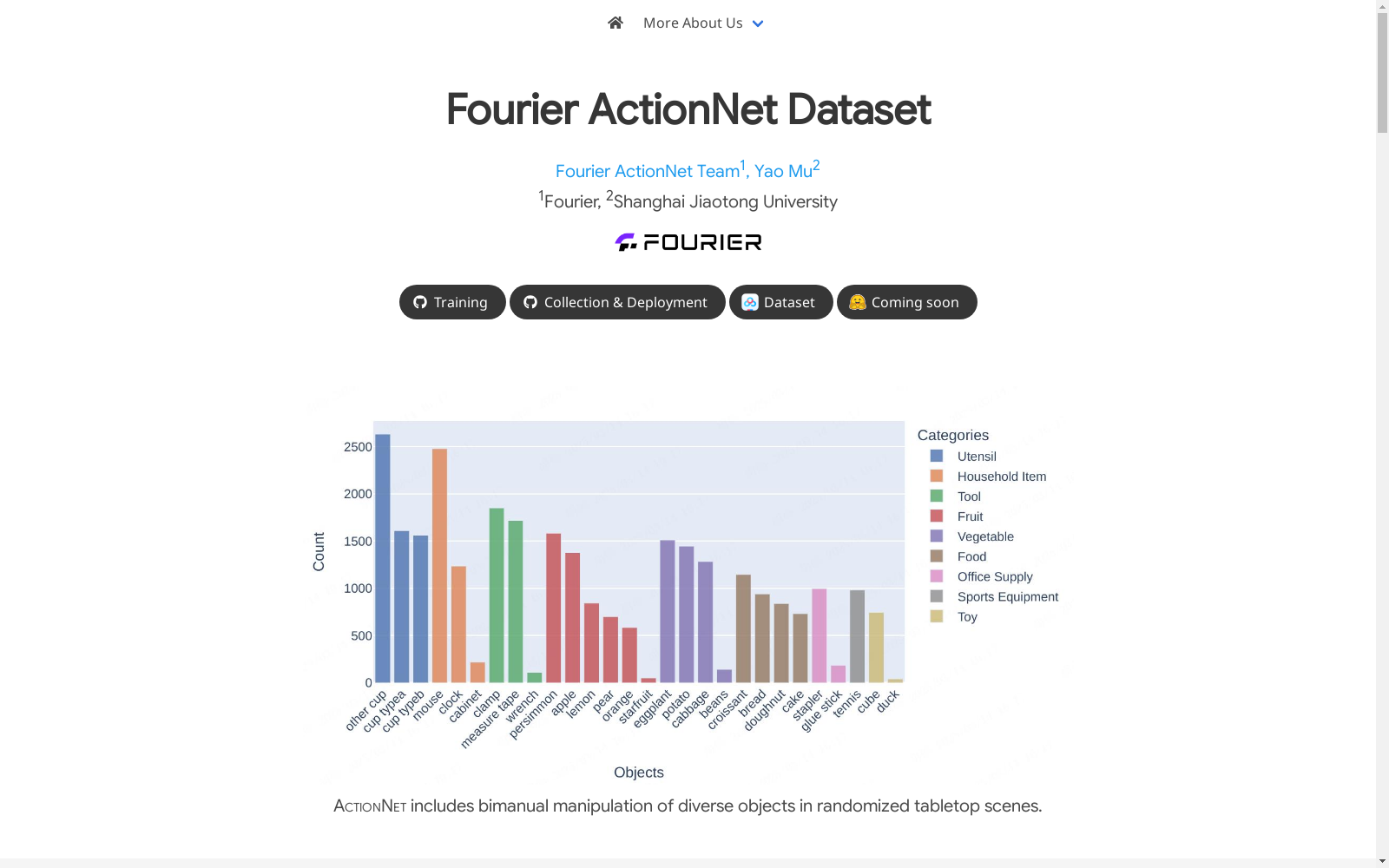
Fourier ActionNet Dataset 是一个专注于双臂灵巧操作的机器人数据集,包含超过30,000条远程操作轨迹和140小时的交互数据,涵盖抓取、倒水、插入等多种任务。数据集通过VR远程操作采集,支持类人机器人学习复杂技能,并提供标注和开源工具,适用于模仿学习、视觉语言对齐和世界模型训练。
Fourier ActionNet Dataset is a robotics dataset dedicated to dual-arm dexterous manipulation. It contains over 30,000 teleoperated trajectories and 140 hours of interactive data, covering diverse tasks including grasping, pouring, inserting and more. Collected through VR teleoperation, the dataset enables humanoid robots to learn complex skills, and is equipped with annotations and open-source tools, making it suitable for imitation learning, vision-language alignment and world model training.
提供机构:
Fourier、上海交通大学
创建时间:
2025-03-17
搜集汇总
数据集介绍
背景与挑战
背景概述
2025年3月17日,傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链。首批上线超3万条高质量真机训练数据,包含多种自由度灵巧手的训练数据及专门针对手部任务的模仿学习数据,面向全球开发者及科研机构开源共享,提供从数据采集、训练、部署的一站式解决方案。
当前挑战
高质量机器人动作数据是具身智能发展的核心驱动力。然而真实场景下的机器人动作数据长期面临采集成本高、标注精度不足等问题,制约着行业进步。Fourier ActionNet数据集囊括傅利叶GRx系列所有机型的各类任务训练,完整记录机器人在真实环境中的任务执行数据,涵盖了对常用工具、家居用品、食物等多种物体的精确取放、倾倒等操作,以及在不同环境条件下实现泛化执行。1. 多模态+高质量+万级体量:万级真机训练数据,包含专门针对手部任务的模仿学习数据,适配多自由度灵巧手任务;2. VLM标注+人工核验:所有数据均采用视觉语言模型(VLM)进行自动标注,并通过人工二次核验,确保数据精度与准确性。
以上内容由遇见数据集搜集并总结生成


