NormalFlow Dataset
收藏arXiv2024-12-13 更新2024-12-14 收录
下载链接:
https://joehjhuang.github.io/normalflow
下载链接
链接失效反馈官方服务:
资源简介:
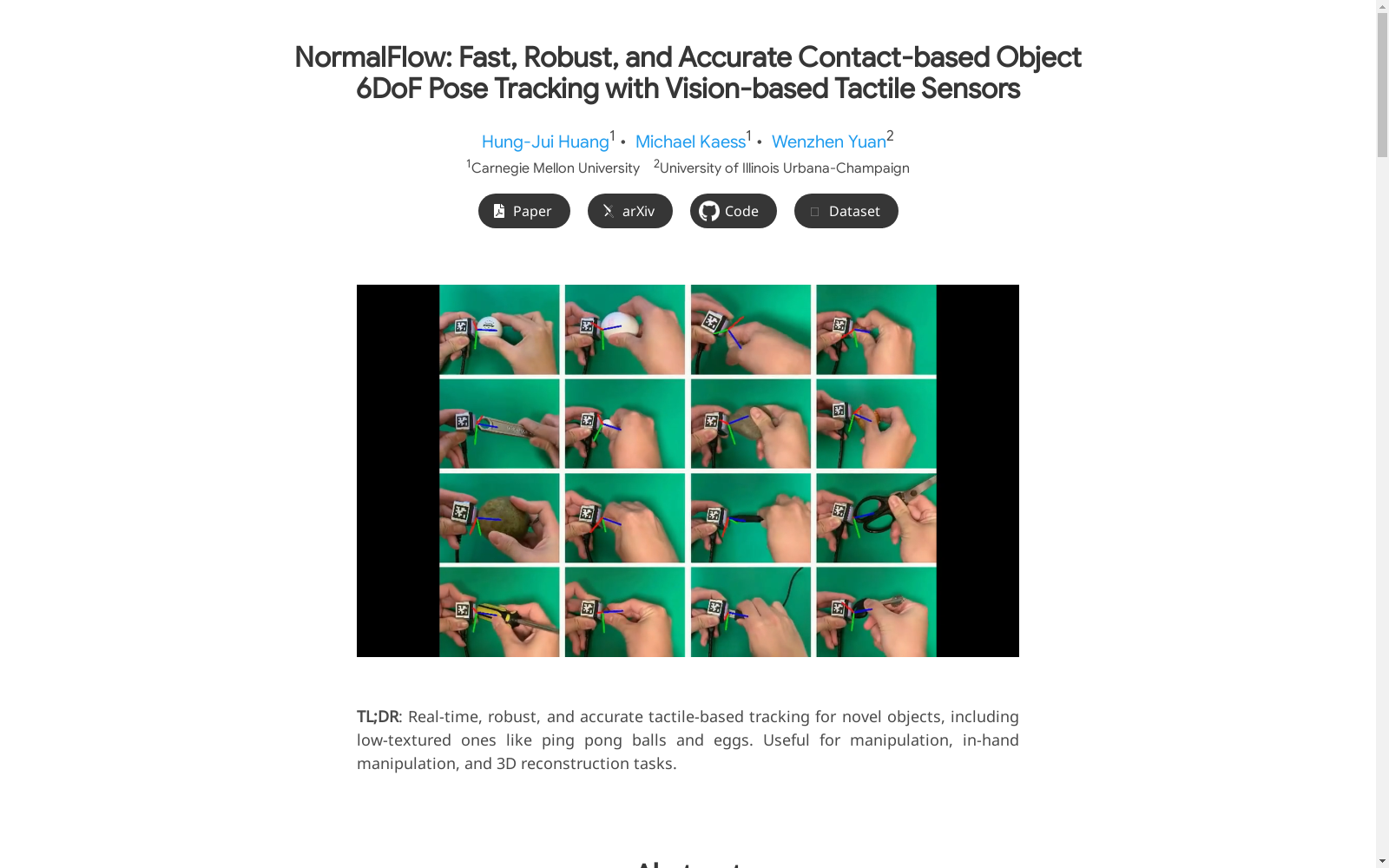
NormalFlow数据集由卡内基梅隆大学和伊利诺伊大学厄巴纳-香槟分校的研究团队创建,用于评估基于触觉的6DoF物体跟踪算法的性能。该数据集包含了12个不同类别的物体,涵盖日常物品、小型纹理物体和简单几何形状。数据集通过GelSight Mini传感器采集,分辨率为320×240,包含多个跟踪试验数据,旨在展示算法在不同物体和运动条件下的表现。数据集的创建过程包括手动标记接触区域和计算表面梯度,最终用于验证NormalFlow算法的精度和鲁棒性。该数据集的应用领域主要集中在机器人感知和控制任务中,旨在解决高精度物体跟踪和3D重建问题。
The NormalFlow Dataset was created by research teams from Carnegie Mellon University and the University of Illinois Urbana-Champaign, to evaluate the performance of tactile-based 6DoF object tracking algorithms. This dataset includes 12 distinct object categories, covering daily objects, small textured objects and simple geometric shapes. Collected via the GelSight Mini sensor with a resolution of 320×240, it contains multiple sets of tracking trial data, designed to demonstrate the performance of algorithms under different object and motion conditions. The dataset creation process involves manually annotating contact regions and calculating surface gradients, and is ultimately used to validate the accuracy and robustness of the NormalFlow algorithm. The main application fields of this dataset focus on robotic perception and control tasks, aiming to solve the problems of high-precision object tracking and 3D reconstruction.
提供机构:
卡内基梅隆大学
创建时间:
2024-12-13
搜集汇总
数据集介绍
构建方式
NormalFlow Dataset通过使用视觉触觉传感器采集的触觉图像构建,这些图像通过光度立体法生成表面法线图。数据集的构建过程包括使用一个直径为5mm的金属球按压传感器表面,采集50张触觉图像,并通过手动标记接触区域来计算每个像素的真实表面梯度。随后,使用多层感知器从像素的颜色和位置映射到表面梯度,最终通过2D快速泊松求解器生成高度图。
特点
NormalFlow Dataset的特点在于其高精度和鲁棒性,能够准确跟踪低纹理物体的6自由度姿态。数据集展示了在不同物体上的跟踪性能,包括日常物品、小型纹理物体和简单几何形状,证明了其在各种应用场景中的广泛适用性。此外,数据集还展示了在长时间跟踪中的低漂移性能,以及在不同传感器和分辨率下的通用性。
使用方法
NormalFlow Dataset可用于评估和验证基于触觉的6自由度物体跟踪算法。用户可以通过比较不同算法的跟踪误差和运行时间来选择最适合其应用的算法。此外,数据集还可用于训练和测试神经网络模型,以提高触觉传感器的物体跟踪和3D重建能力。通过分析数据集中的触觉图像和表面法线图,研究人员可以进一步优化和开发新的触觉感知算法。
背景与挑战
背景概述
NormalFlow Dataset由Hung-Jui Huang、Michael Kaess和Wenzhen Yuan等人于2024年提出,旨在解决基于视觉触觉传感器的高精度6自由度(6DoF)物体姿态跟踪问题。该数据集的核心研究问题是如何在无需物体3D模型的情况下,利用视觉触觉传感器实现快速、鲁棒且准确的物体跟踪。NormalFlow算法通过最小化接触区域表面法线图之间的差异,显著提升了触觉跟踪的精度和鲁棒性,尤其在低纹理物体上的表现尤为突出。该数据集的提出为机器人操作、手内操作和3D重建等任务提供了新的可能性,推动了触觉感知与控制领域的发展。
当前挑战
NormalFlow Dataset在构建过程中面临了多项挑战。首先,触觉传感器获取的点云数据通常存在噪声和失真,传统的点云配准方法难以应对这些挑战。其次,低纹理物体的跟踪问题尤为复杂,因为缺乏明显的特征点,导致跟踪精度下降。此外,长时间跟踪过程中容易出现累积误差,影响整体跟踪的稳定性。最后,数据集的构建需要处理不同传感器和分辨率下的通用性问题,确保算法在不同设备上的适用性。这些挑战共同构成了NormalFlow Dataset在实际应用中的主要障碍。
常用场景
经典使用场景
NormalFlow数据集的经典使用场景主要集中在机器人操作和触觉感知领域。该数据集通过视觉触觉传感器捕捉物体表面的法线信息,利用NormalFlow算法进行6自由度(6DoF)的物体姿态跟踪。这一技术在机器人抓取、手内操作和3D重建等任务中具有重要应用,尤其是在处理低纹理物体时表现出色。例如,通过滚动传感器在物体表面进行360度扫描,NormalFlow能够实现高精度的旋转跟踪,误差仅为2.5度。
衍生相关工作
NormalFlow数据集的发布推动了触觉感知和机器人操作领域的多项相关研究。例如,基于NormalFlow的高精度跟踪算法,研究人员开发了新的触觉3D重建方法,显著提升了重建几何的精度。此外,NormalFlow的鲁棒性和实时性也激发了更多关于长时跟踪和低漂移技术的研究。在机器人操作领域,NormalFlow的成功应用为其他触觉感知任务提供了新的思路,如物体识别、表面纹理分析等。
数据集最近研究
最新研究方向
NormalFlow Dataset在机器人触觉感知与物体跟踪领域展现了显著的前沿研究进展。该数据集通过引入基于视觉触觉传感器的快速、鲁棒且实时的6自由度(6DoF)物体跟踪算法NormalFlow,解决了传统视觉系统在物体操作过程中易受遮挡影响的问题。NormalFlow通过最小化接触区域表面法线图之间的差异,而非传统的点云配准方法,显著提升了低纹理物体(如桌面)的跟踪精度,并在长时间跟踪任务中表现出极低的漂移误差。此外,该数据集还展示了其在触觉辅助的3D重建任务中的卓越性能,为高精度感知与操作任务开辟了新的可能性。
相关研究论文
- 1NormalFlow: Fast, Robust, and Accurate Contact-based Object 6DoF Pose Tracking with Vision-based Tactile Sensors卡内基梅隆大学 · 2024年
以上内容由遇见数据集搜集并总结生成


