GM-100
收藏GM-X 数据集概述
项目简介
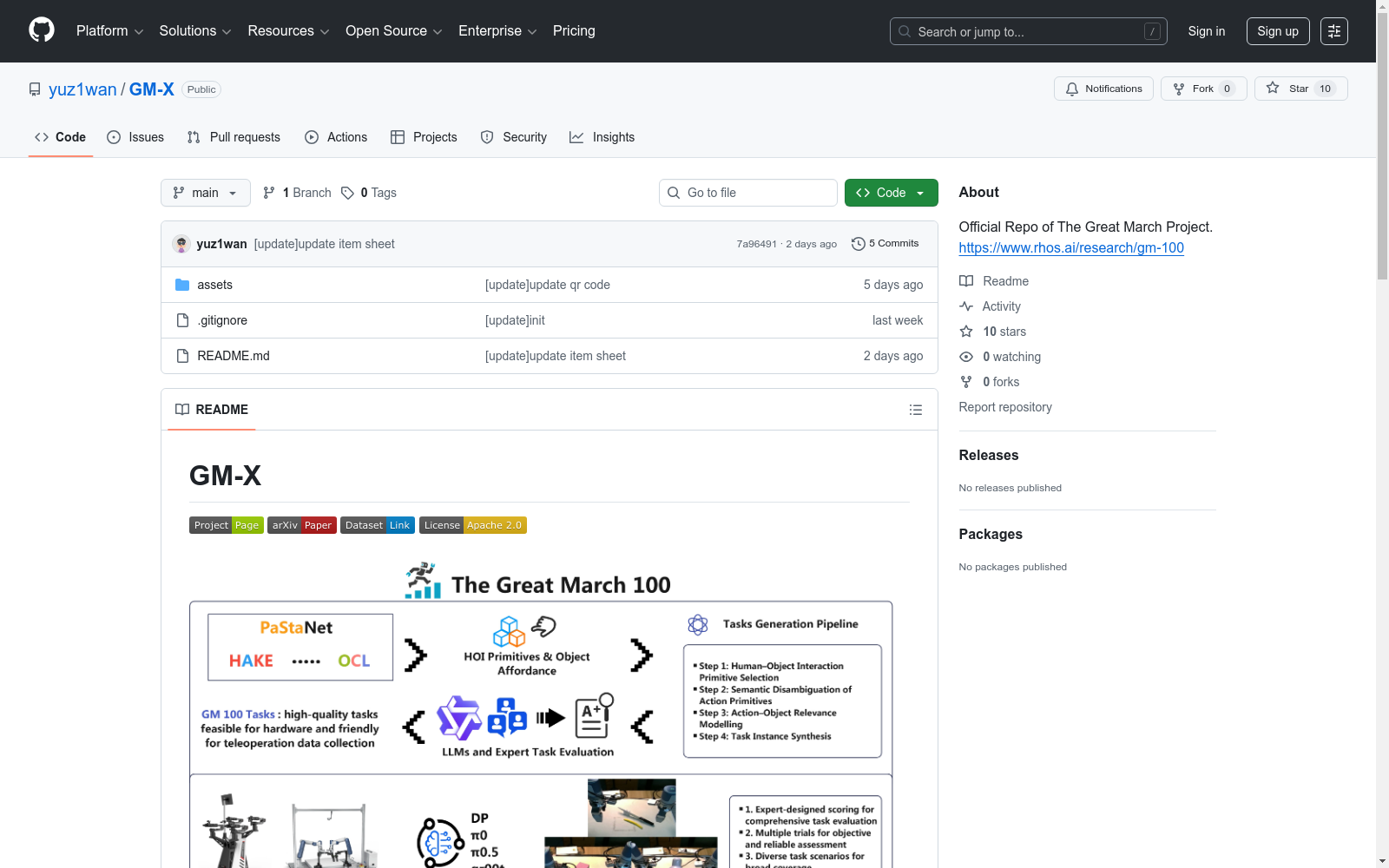
GM-X 是一个由 rhos.ai 主导的研究项目。该项目旨在应对当前机器人学习领域任务结构发展滞后于数据规模的挑战。通过整合人类活动知识(HAKE)与物体可供性(Object Affordances),项目团队开发了一个系统化的任务设计框架,专注于识别和评估机器人处理多样化、长尾和复杂交互任务的能力。该框架旨在为具身智能体提供更全面的评估,并鼓励开发日益复杂和多样化的机器人数据集。
作为迈向“机器人学习奥林匹克”的首个里程碑,项目团队发布了 GM-100 基准。该基准包含 100 个精心策划的任务,涵盖了广泛的长尾行为,并得到了在多个机器人平台上收集的超过 13,000 条专家轨迹的支持。GM-X 作为一个基础生态系统,旨在营造一个透明、协作的环境,以推动通用机器人智能的边界。
数据集详情
GM-100 数据集已公开,可用于研究目的。
数据访问与下载
数据集可通过 Hugging Face 页面访问和下载:https://huggingface.co/rhos-ai
可用数据版本:
数据集规模与内容
- 任务数量:100 个。
- 轨迹数量:超过 13,000 条专家演示轨迹。
- 任务特点:涵盖广泛的长尾行为,注重细节。
- 数据收集:在多个机器人平台上进行。
项目动态
- [2026-02-03] 任务对象购买链接已在项目页面提供。
- [2026-01-18] 项目页面预览版已上线。
- [2026-01-16] GM-100 论文已在 arXiv 发布。
引用信息
如果本工作对您的研究有帮助,请考虑引用: bibtex @misc{wang2026greatmarch100100, title={The Great March 100: 100 Detail-oriented Tasks for Evaluating Embodied AI Agents}, author={Ziyu Wang and Chenyuan Liu and Yushun Xiang and Runhao Zhang and Qingbo Hao and Hongliang Lu and Houyu Chen and Zhizhong Feng and Kaiyue Zheng and Dehao Ye and Xianchao Zeng and Xinyu Zhou and Boran Wen and Jiaxin Li and Mingyu Zhang and Kecheng Zheng and Qian Zhu and Ran Cheng and Yong-Lu Li}, year={2026}, eprint={2601.11421}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2601.11421}, }
许可协议
本项目采用 Apache 2.0 许可证。