Orbis
收藏Orbis 数据集概述
数据集简介
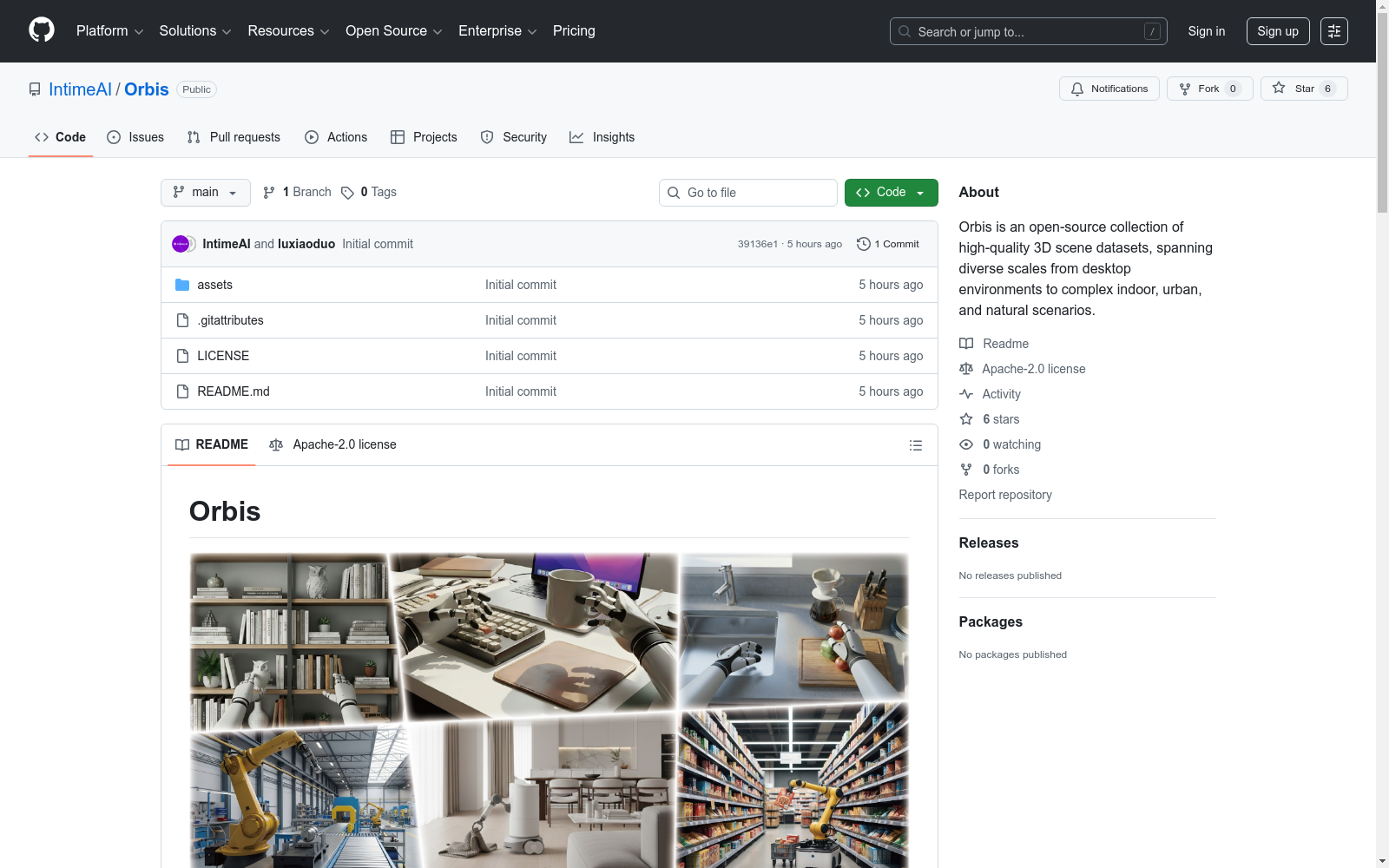
Orbis 是一个开源的高质量 3D 场景数据集集合,涵盖从桌面(小尺度)环境到复杂室内(中尺度)、城市和自然(大尺度) 场景的多样化规模。所有场景均具备仿真就绪的完整物理属性,可与物理引擎无缝集成。基于先进的生成模型,该数据集支持通过文本和图像等多模态输入进行精确的场景编辑与定制。同时提供 API 功能,支持程序化访问和自动化的大规模数据集生成。
核心特性
高多样性
涵盖从桌面(小尺度)环境到复杂室内(中尺度)、城市和自然(大尺度) 场景的广泛类型。每个场景均包含丰富的物体组合、多样的布局变化和逼真的空间配置。
高保真度
采用基于物理的渲染(PBR)材质系统,并配备完整的纹理贴图(漫反射、法线、粗糙度、金属度等),以确保视觉真实感和一致性。
强可控性
基于底层生成模型,可使用文本描述和参考图像等多模态输入对场景进行精确编辑和定制。场景以 USD/USDC 格式存储,支持灵活修改,以生成符合特定需求的多样化训练数据。
仿真就绪
所有场景均具备完整的物理属性,可与主流物理引擎和仿真平台(如 Isaac Sim、Omniverse、MuJoCo)无缝集成。这使得 Orbis 可直接用于机器人操作、导航等具身 AI 任务的训练和测试。在动态场景渲染中表现优异,支持实时物理模拟和高质量视觉效果。
可用子集
| 数据集 | 描述 | 状态 | GitHub 链接 |
|---|---|---|---|
| Orbis-Desktop-v1 | 包含物体和设备的桌面场景 | ✅ 已可用 | https://github.com/IntimeAI/Orbis-Desktop-v1 |
| Orbis-Home-v1 | 具有多样化布局和家具的家庭场景 | 🚧 即将推出 | - |
| Orbis-Urban-v1 | 包含街道、建筑和城市环境的城市场景 | 🚧 即将推出 | - |
更多专业子集正在开发中。
应用场景
- 机器人操作学习:为机器人抓取、放置等操作任务提供逼真的训练环境。
- 物体检测与识别:丰富的物体类别和场景变化,适用于训练视觉感知模型。
- 虚拟现实与可视化:高质量的视觉效果,适用于 VR/AR 应用开发。
- 合成数据生成:可控的场景参数,便于大规模标注数据的生成。
引用
若在研究中使用了 Orbis 数据集,请引用: bibtex @dataset{orbis2026, title={Orbis: A High-Quality 3D Scene Dataset}, author={IntimeAI}, year={2026}, publisher={github}, url={https://github.com/IntimeAI/Orbis} }
许可证
本数据集基于 Apache License 2.0 发布。